Übersteuern (Fahrzeug)
Übersteuern bezeichnet das Verhalten eines Fahrzeuges in Kurven, bei dem der Schräglaufwinkel an den Hinterrädern größer ist als an den Vorderrädern. Das Heck drängt nach außen, der Lenkeinschlag ist geringer als es dem Kurvenradius entspräche.
_S%C3%BCdkehre.jpg)
Zum Übersteuern neigen Fahrzeuge mit Hinterradantrieb, vor allem solche mit Heckmotor und entsprechend hoher Last auf der Hinterachse. Beispiele für Pkw mit ausgeprägter Neigung zum Übersteuern sind der VW Käfer, Porsche 356, 911 (insbesondere die Modelle GT2 und GT3), Renault Dauphine, Tatra 603 und Škoda 100.
Das gegenteilige Verhalten bezeichnet man als Untersteuern. Untersteuernde Fahrzeuge schieben in einer Kurve mit den Vorderrädern zum äußeren Kurvenrand. Dieses Verhalten ist typisch für frontangetriebene Fahrzeuge.
Fahrsicherheit und Motorsport
BearbeitenGrundsätzlich verringert sowohl übersteuerndes als auch untersteuerndes Eigenlenkverhalten von Pkw die erreichbaren Kurvengeschwindigkeiten und damit die Fahrsicherheit. Deshalb wird im Allgemeinen ein neutrales Eigenlenkverhalten angestrebt. Die Tendenz des übersteuernden Fahrzeugs, „mehr Kurve“ zu fahren als am Lenkrad eingestellt ist, gilt als noch unsicherer als untersteuerndes Verhalten. Denn die Korrektur erfordert Übung und eine entsprechende Fahrtechnik, andernfalls kann es zum unbeherrschbaren Ausbrechen des Hecks kommen. Gleichzeitig gibt es den Driftsport, bei dem es darum geht, das Eigenlenkverhalten übersteuernder Fahrzeuge gezielt auszunutzen, um die Kurvenfahrt besonders spektakulär in Szene zu setzen oder um die möglichen Kurvengeschwindigkeiten über die Haftgrenze hinaus voll auszureizen.
Ausgleichsfedern an der Hinterachse und Stabilisatoren an der Vorderachse wirken dem Übersteuern entgegen, bei modernen Fahrzeugen auch elektronisch gesteuerte Systeme wie das elektronische Stabilitätsprogramm (ESP), indem es automatisch das kurvenäußere Vorderrad abbremst.
Definition
Bearbeiten
Nach DIN ISO 8855 liegt Übersteuern vor, wenn bei stationärer Kreisfahrt die Differenz der Gradienten von Lenkwinkel und Ackermannwinkel bezüglich der Querbeschleunigung kleiner Null ist.[1]




Diese Definition hat eine ältere nach Olley abgelöst, bei der die Schräglaufwinkeldifferenz von Vorderachse und Hinterachse herangezogen wurde.[2] Basis der Auswertung ist ein Diagramm, in dem der Lenkwinkel und der Ackermannwinkel als Funktion der Querbeschleunigung dargestellt sind. Auf konstantem Kurvenradius ist der Ackermannwinkel konstant. Wenn der Fahrer den Lenkradeinschlag mit zunehmender Querbeschleunigung zurücknehmen muss, liegt Übersteuern vor. Diese Definition nach Bergmann orientiert sich an Begriffen des Einspurmodells und beschreibt das Eigenlenkverhalten über den gesamten Querbeschleunigungsbereich. Da Fahrzeuge mit negativem Eigenlenkgradienten bei der kritischen Geschwindigkeit instabil werden, sind alle PKW bis mindestens mittleren Querbeschleunigungen untersteuernd ausgelegt. Im Gegensatz dazu wird im Rennsport häufig nur das Verhalten an der Kraftschlussgrenze (Rutschgrenze) betrachtet. Als Übersteuernd wird ein Fahrzeug bezeichnet, bei dem zuerst die Hinterachse die Rutschgrenze erreicht. Das Fahrzeug wird instabil und kann nur durch aktives Gegenlenken oder ESP wieder stabilisiert werden.
Grafische Darstellung:
-
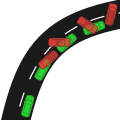 Übersteuern: Das Heck drängt nach außen, der Lenkeinschlag ist geringer als es dem Kurvenradius entspräche
Übersteuern: Das Heck drängt nach außen, der Lenkeinschlag ist geringer als es dem Kurvenradius entspräche -
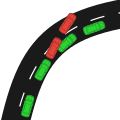 Untersteuern: Die Fahrzeugschnauze schiebt über die Vorderräder zum äußeren Kurvenrand
Untersteuern: Die Fahrzeugschnauze schiebt über die Vorderräder zum äußeren Kurvenrand


Der, für seine treffenden und humorvollen Aussagen bekannte, deutsche Rallyepilot Walter Röhrl hat diese Thematik folgendermaßen beschrieben: „Untersteuern ist, wenn Du den Baum siehst, in den Du reinfährst. Übersteuern ist, wenn Du ihn nur hörst.“[3][4]
Literatur
Bearbeiten- Konrad Reif (Hrsg.): Bosch Grundlagen Fahrzeug- und Motorentechnik. 1. Auflage, Vieweg + Teubner, Wiesbaden 2011, ISBN 978-3-8348-1598-9.
- Manfred Mitschke: Dynamik der Kraftfahrzeuge. 2. völlig neubearbeitete Auflage, Band C Fahrverhalten, Springer Verlag, Berlin 1990, ISBN 978-3-642-86471-1.
Weblinks
Bearbeiten- Definition Übersteuerung/Untersteuerung (abgerufen am 30. November 2015)
- KFZ-Schule Untersteuern & Übersteuern – Erklärung im Video. Auf YouTube. (deutsch)
- auto motor und sport Alexander Bloch erklärt Unter- und Übersteuern. Auf YouTube. (deutsch)
Einzelnachweise
Bearbeiten- ↑ Karl-Ludwig Haken: Grundlagen der Kraftfahrzeugtechnik. 4. Auflage. Hanser, 2015, ISBN 978-3-446-44216-0, S. 252. (eingeschränkte Vorschau in der Google-Buchsuche)
- ↑ Erich Schindler: Fahrdynamik: Grundlagen des Lenkverhaltens und ihre Anwendung für Fahrzeugregelsysteme. expert verlag, 2007, ISBN 978-3-8169-2658-0, S. 36. (eingeschränkte Vorschau in der Google-Buchsuche)
- ↑ Walter Röhrl - Sprüche & Zitate. Abgerufen am 8. Februar 2024.
- ↑ Walther Röhrl wird 70: Seine besten Zitate. In: Der Spiegel. 3. März 2017, ISSN 2195-1349 (spiegel.de [abgerufen am 8. Februar 2024]).