Mars Science Laboratory
Mars Science Laboratory (kurz MSL) ist eine NASA-Mission im Rahmen des Flagship-Programms, die den Mars hinsichtlich seiner aktuellen und vergangenen Eignung als Biosphäre erforscht. Hierzu wurde auf der Oberfläche ein weitgehend autonomer Rover mit dem Namen Curiosity (englisch für ‚Neugier‘) abgesetzt, der mit zehn Instrumenten zur Untersuchung von Gestein, Atmosphäre und Strahlung ausgerüstet ist. Zu deren Analyse kommen neben einer großen Zahl unterschiedlicher Spektrografen auch Kameras und meteorologische Instrumente zum Einsatz, welche die Messdaten für die Auswertung zur Erde schicken. Mit einer Masse von 900 kg und der Größe eines kompakten Kleinwagens war Curiosity bis zur Landung von Perseverance im Februar 2021 das schwerste von Menschen geschaffene Objekt auf der Marsoberfläche und löste die Viking-Tochtersonden mit je knapp 600 kg ab.
| Mars Science Laboratory | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Phase: E / Status: aktiv | ||||||||||||||||||||||
 Selbstporträt des Rovers Curiosity | ||||||||||||||||||||||
| Typ | Mars-Rover | |||||||||||||||||||||
| Land | ||||||||||||||||||||||
| Organisation | ||||||||||||||||||||||
| COSPAR-Bezeichnung | 2011-070A | |||||||||||||||||||||
| NORAD/SCN-ID | 37936 | |||||||||||||||||||||
| Missionsdaten | ||||||||||||||||||||||
| Startdatum | 26. November 2011, 15:02 UTC | |||||||||||||||||||||
| Startplatz | Cape Canaveral AFS, LC-41 | |||||||||||||||||||||
| Trägerrakete | Atlas V (541) (AV-028) | |||||||||||||||||||||
| Missionsdauer | Primärmission: 669 Mars Sols (687 Erdentage) Aktuell: 4400 Sols (4521 Erdentage) | |||||||||||||||||||||
| Landeplatz | „Bradbury Landing“ im Gale Krater 4° 35′ 22″ S, 137° 26′ 30″ O | |||||||||||||||||||||
| Sonstiges | ||||||||||||||||||||||
| ||||||||||||||||||||||



Die Technik wurde auf Basis der Erfahrungen mit den beiden Mars Exploration Rovern entwickelt und verfügt in allen Bereichen über deutlich mehr Leistung. Zusätzlich sind noch einige Innovationen eingeflossen, besonders im Bereich seines Landesystems (sanftes, gezieltes Aufsetzen statt ungenauer Airbag-Aufschlaglandung). Des Weiteren erhielt Curiosity für seine Energieversorgung Radionuklidbatterien anstatt wetterabhängiger Solarzellen.
Am 26. November 2011 startete die Sonde an Bord einer Atlas-V-Trägerrakete von der Cape Canaveral Air Force Station aus;[1] die Landung auf dem Mars wurde am 6. August 2012 bestätigt.[2] Kurz nach der Landung begann Curiosity, die ersten Bilder zur Erde zu senden, und arbeitet seit 4400 Sols.
Vorgeschichte
Bearbeiten.jpg)
Zum ersten Mal wurde die Mission 2003 in einem Dokument mit dem Namen „New Frontiers in the Solar System: An Integrated Exploration Strategy“ erwähnt, das von den National Academies veröffentlicht wurde und Kosten im Bereich von 325 bis 650 Millionen US-Dollar nannte.[3] Im April 2004 veröffentlichte die NASA einen Aufruf an die Wissenschaftsgemeinde, Ideen und Konzepte für die wissenschaftlichen Instrumente des Mars Science Laboratory vorzulegen.[4] Am Ende des Jahres testete Aerojet ein altes Reserve-Triebwerk aus dem Viking-Programm, um erste Daten für die Konstruktion einer verbesserten Version für die Abstiegsstufe zu erhalten. Kurz darauf wurden acht Konzepte aus den Antworten auf den Aufruf vom Frühjahr zur Integration und weiteren Entwicklung ausgewählt.[4] Im Mai 2006 fand der erste Workshop zur Bestimmung des Landeortes für den Rover statt.[5] Anschließend passierte das Projekt das Preliminary Design Review, was zur Freigabe von 1,63 Mrd. US-Dollar für die Entwicklung führte,[6] und im Juni 2007 wurde das abschließende Critical Design Review bestanden.[7]
Im November 2008 waren die Entwicklung und Integration der meisten Systeme fast abgeschlossen, und die Testphase begann.[8] Kurz darauf wurde jedoch klar, dass der ursprüngliche Starttermin im Oktober 2009 nicht mehr einzuhalten war, weswegen er auf Ende 2011 verlegt wurde.[9] Grund hierfür waren technische Probleme, die nicht schnell genug gelöst werden konnten, als dass man noch rechtzeitig alle vorgesehenen Tests hätte absolvieren können. Betroffen waren insbesondere die Aktoren, die zu großen Teilen neu entworfen werden mussten. Diese Verzögerung erhöhte die Missionskosten um weitere 400 Mio. US-Dollar auf insgesamt 2,2 Mrd. Dollar, wobei diese Zahl bis zum Start auf 2,5 Mrd. Dollar anwuchs.[10]
Am 27. Mai 2009 wurde schließlich der offizielle Name des Rovers der Mission bekanntgegeben: Curiosity. Zuvor war ein öffentlicher Wettbewerb zur Namensgebung ausgeschrieben worden, den die Sechstklässlerin Clara Ma mit diesem Namensvorschlag und einem kurzen Aufsatz zu dessen Bedeutung für sich entschied.[11] Am 22. Juni 2011 verließ das Mars Science Laboratory nach abschließenden Tests die Werkshallen des JPL in Kalifornien und wurde mit einer C-17 der United States Air Force zum Kennedy Space Center geflogen, wo die letzten Vorbereitungen für den Start und die Integration mit der Atlas-V-Trägerrakete stattfanden.[12]
Am 22. Juli 2011 wurde nach über fünfjähriger Suche bekanntgegeben, dass die Wahl auf den Gale-Krater als Landeort gefallen war.[13]
Missionsziele
Bearbeiten.jpg)

Das übergeordnete, allgemeine Ziel von Curiosity ist die Untersuchung, ob der Mars aktuell oder in der Vergangenheit in der Lage war, Leben zu beherbergen.[14]
Hieraus leiten sich acht konkrete wissenschaftliche Aufgaben ab:[15]
- Erfassung der Zusammensetzung und Menge von kohlenstoffhaltigen organischen Verbindungen
- Quantitative Messung der Grundbausteine des Lebens (Wasserstoff, Stickstoff, Sauerstoff, Kohlenstoff, Phosphor und Schwefel)
- Suche nach Strukturen, die auf biologische Prozesse hindeuten
- Untersuchung der Marsoberfläche hinsichtlich ihrer mineralogischen, chemischen und Isotopen-Zusammensetzung
- Erforschung der Prozesse, welche den Boden und die Felsen geschaffen und beeinflusst haben
- Feststellung der aktuellen Verteilung und des Zustandes von Wasser und Kohlenstoffdioxid
- Analyse der Atmosphären-Evolution über einen Zeitraum von 4 Milliarden Jahren
- Erfassung des Strahlungsniveaus und -spektrums auf der Marsoberfläche
Aus technologischer Sicht sollen drei weitere Ziele erreicht werden:[16]
- Demonstration von Langstrecken-Fortbewegung (5–20 km) auf dem Mars
- Präzisionslandung in einem Zielkreis von 20 km Durchmesser
- Validierung der Möglichkeit, einen schweren und großen Rover auf dem Mars zu landen (wichtig für eine spätere Mars-Sample-Return-Mission)
Technischer Überblick Mars Science Laboratory
BearbeitenAufbau
BearbeitenFolgende Zeichnung illustriert den Aufbau des Mars Science Laboratory und bietet einen kurzen Überblick über die Funktionen der einzelnen Komponenten.
| Marschflug- Modul |
 |
Dieses Modul steuerte das Mars Science Laboratory während des Fluges von der Erde zum Mars. Außerdem enthielt es Teile für die Kommunikation und für die Regelung der Temperatur. Vor dem Eintritt in die Marsatmosphäre wurde das Modul von der Kapsel abgetrennt. |
| Kapsel |  |
Die Kapsel enthielt die Abstiegsstufe, also SkyCrane und Rover, und schützte sie vor den Einflüssen des offenen Weltraums sowie den Belastungen während des Eintritts in die Marsatmosphäre. Am oberen Teil befand sich ein Behälter für den Fallschirm, der den Abstieg der Kapsel verlangsamte. An der Fallschirmhalterung waren außerdem diverse Antennen zur Kommunikation angebracht. |
| Abstiegsstufe |  |
Nachdem Hitzeschild und Kapsel ihre Aufgabe erfüllt hatten, wurden diese abgetrennt und gaben die Abstiegsstufe frei. Diese sorgte für das sanfte und präzise Aufsetzen des Rovers auf der Marsoberfläche, was durch den Einsatz eines Radars und individueller Steuertriebwerke erreicht wurde. Zudem enthielt die Stufe den SkyCrane sowie wichtige Komponenten für die Kommunikation während des Marschfluges. Die Abstiegsstufe blieb einige Meter über der Oberfläche schwebend stehen, dann ließ der SkyCrane den Rover die letzten Meter an Seilen auf die Marsoberfläche herab. |
| Rover Curiosity |  |
Der Rover mit dem Namen Curiosity ist das Kernstück der Mission und trägt alle wissenschaftlichen Instrumente sowie wichtige Kommunikationssysteme. Um Platz zu sparen, war das Fahrwerk während des Transports eingeklappt. |
| Hitzeschild |  |
Der Hitzeschild schützte die anderen Komponenten vor den extrem hohen Temperaturen beim Eintritt in die Marsatmosphäre. |
| Gesamtsystem |  |
Zusammengesetzt ergab sich die 3,4 Tonnen[17] schwere, flugbereite Konstruktion wie auf dem Bild gezeigt. Abstiegsstufe und Rover befanden sich innerhalb der Kapsel, auf der wiederum das Marschflug-Modul montiert war. |
Kommunikationssystem
BearbeitenDie folgende Abbildung bietet einen Überblick über das Kommunikationssystem des Mars Science Laboratory.

Technik der Marschflug- und Landesysteme
BearbeitenMarschflug-Modul
Bearbeiten
Das Mars Science Laboratory wurde während der Wegstrecke von der Erde bis zum Mars vom Marschflug-Modul gesteuert, das auf der Kapsel montiert war. Das Modul war ringförmig mit einem Durchmesser von vier Metern und wies inkl. Treibstoff eine Masse von 600 kg auf.[17] Es bestand aus Aluminium und wurde durch mehrere Verstrebungen stabilisiert. Auf der Oberfläche des Rings waren zwölf einzelne Solarzellen zur Energieversorgung angebracht, die bei einer Effizienz von 28,5 % dafür ausgelegt waren, am Ende der Mission (kurz vor dem Eintritt der Kapsel in die Marsatmosphäre) noch mindestens 1 kW elektrische Leistung zu produzieren.[18] Um bei sehr energieintensiven Operationen genügend Leistung abrufen zu können, waren außerdem mehrere Lithium-Ionen-Akkumulatoren vorhanden.[19] Darüber hinaus war das Modul mit den Batterien der Abstiegsstufe und dem Energieversorgungssystem von Curiosity verbunden, so dass die Möglichkeit bestand, bei Problemen im Flug die Stromversorgung neu zu organisieren.[20]
Während des Marschfluges war das MSL spinstabilisiert mit einer Drehzahl von 2 min−1 um die Symmetrieachse. Zur Ermittlung der Lage im Raum wurden ein Sternsensor und einer von zwei Sonnensensoren eingesetzt.[21] Ersterer beobachtete mehrere dynamisch ausgewählte Leitsterne, der Sonnensensor benutzte ausschließlich die Sonne als Referenzpunkt. Das System war redundant ausgelegt, damit die Sicherheit der Mission erhöht werden konnte. Zur Steuerung der Spinstabilisierung und zur Durchführung von Bahnmanövern dienten acht Schubdüsen, die mit Hydrazin-Treibstoff betrieben wurden.[19] Dieser befand sich in zwei kugelförmigen Tanks aus Titan.
Da die Radionuklidbatterie von Curiosity beständig große Mengen Wärme abgab (Details siehe Energieversorgung), musste diese aus dem Inneren der Kapsel abgeführt werden, damit eine Überhitzung vermieden werden konnte. Daher besaß das Marschflug-Modul insgesamt zehn Radiatoren, welche die Wärme in den Weltraum abstrahlten.[19] Es handelte sich hierbei um einfache Metallflächen, die gut sichtbar an den Seiten des Moduls angebracht waren. Über eine komplexe Rohrleitung und eine Pumpe bildeten sie einen Kühlmittelkreislauf mit der Radionuklidbatterie des Rovers.[19] Einige Komponenten (z. B. die Batterien und Akkumulatoren) wurden auf diesem Wege auch gezielt beheizt, damit sie vor Kälteschäden bewahrt werden konnten. Mehrere Temperatursensoren sorgten hierbei für die automatische Einstellung des Kühl- bzw. Heizsystems.[19]
Das Marschflug-Modul selbst enthielt zwar keine eigenen Kommunikationssysteme, es besaß allerdings die „Medium Gain Antenna“ (MGA), die an den Sende-Empfangskomplex der Abstiegsstufe über Schalter angeschlossen werden konnte.[21] Über diese Hornantenne wurde während des Marschfluges und der ersten Landephase ein Großteil der Kommunikation abgewickelt. Da die MGA eine mittelstark ausgeprägte Richtwirkung aufwies, musste sie zumindest grob auf die Erde ausgerichtet werden, um eine gute Verbindungsqualität zu erreichen.[21] Im Gegenzug bot diese Eigenschaft eine höhere Datenrate bei gleicher Sendeleistung im Vergleich zu einfachen, rundstrahlenden Antennen wie z. B. der PLGA. Bei optimaler Ausrichtung betrug der Antennengewinn etwa 18 Dezibel, wobei entweder links- oder rechtsdrehend polarisierte Signale übertragen werden konnten.[21] Gesendet wurde bei 8401 MHz mit einer Datenrate von bis zu 10 kBit/s, der Empfang fand mit etwa 1,1 kBit/s bei 7151 MHz statt.[21]
Kapsel
Bearbeiten


Die 731 kg[17] schwere Kapsel, hergestellt von Lockheed Martin, schützte den Fallschirm, die Abstiegsstufe und den Rover Curiosity vor den Einflüssen des offenen Weltraums und vor den harschen Bedingungen während des Eintritts in die Marsatmosphäre. Die Struktur war in Wabenkernbauweise ausgeführt, in der zwei CFK-Platten von einem Aluminium-Wabenkern gestützt wurden.[22] Auf der Oberfläche befand sich ein dünner ablativer Hitzeschild, der aus einer korkartigen, siliziumbasierten Verbindung bestand. Hierbei handelte es sich um die letzte Version einer Familie von Werkstoffen, deren Wurzeln bis auf die Viking-Sonden zurückgehen und zuletzt bei der Stardust- und Genesis-Mission verwendet wurden.[22]
Um im Weltraum und während des Eintritts in die Marsatmosphäre Steuermanöver durchführen zu können, verfügte die Kapsel über acht kleine Triebwerke (jeweils paarweise angeordnet) und acht je 25 kg schwere Ballastgewichte aus Wolfram.[23][24] Während des Marschfluges sorgten die Wolframgewichte für die Übereinstimmung von Rotations- und Symmetrieachse.[25] Während des Eintritts wurden sie ausgestoßen, um den Schwerpunkt zu verändern, was wiederum Einfluss auf den Anstellwinkel hatte.[24] Die Triebwerke, die einen Schub von bis zu 267 Newton entwickeln konnten, wurden nur zur Kontrolle der Rotation und Ausrichtung genutzt, sie dienten nicht der Abbremsung.
Auf dem oberen Teil der Kapsel befand sich der Behälter für den Fallschirm, mit dem die Kapsel im unteren Teil der Atmosphäre weiter abgebremst wurde. An der Halterung waren mehrere Antennen zur Kommunikation angebracht. Der Fallschirm maß ca. 16 m im Durchmesser und erreichte mit seinen 80 Befestigungsseilen eine Länge von über 50 m.[26] Die Fallschirmhalterung war flexibel konstruiert und konnte so die Bewegung und die Vibrationen des Schirms zu einem gewissen Teil ausgleichen. Der Fallschirm war ausgelegt für einen Einsatz beim Unterschreiten der Mach-2-Grenze und eine Bremskraft von bis zu 289 kN.[26]
Den untersten Teil der Kapsel bildete ein ablativer Hitzeschild, der alle anderen Komponenten vor den sehr hohen Temperaturen (bis zu 2000 °C)[22] beim Eintritt in die Marsatmosphäre schützte. Mit einem Durchmesser von 4,57 m war es bis dato der größte Hitzeschild, der je für eine Forschungsmission gebaut wurde.[22] Die Kacheln des Schildes bestanden aus einem noch relativ neuen Material, das als „Phenolic Impregnated Carbon Ablator“ (PICA) bezeichnet wird und bis jetzt nur bei der Stardust-Mission verwendet wurde. Es basiert auf einer Kohlenstoff-Phenol-Verbindung, die ein besonders gutes Verhältnis von Schutzwirkung zu Masse aufweist. Der Schild war für eine thermische Belastung von 216 W/cm² ausgelegt, eine Scherung von bis zu 540 Pa und einen Staudruck beim Flug durch die Atmosphäre von etwa 37 kPa.[27]
Der Hitzeschild enthielt auch sieben Druck- und Temperaturmesser.[27] Diese sollten die Belastungen des Schildes während des Eintritts mit hoher Genauigkeit aufzeichnen. Die Daten sind für die Konstrukteure von großer Wichtigkeit, da man die Schilde aktuell nach den Ergebnissen von Simulationen konstruiert.[27] Diese sind allerdings auf die Atmosphäre der Erde optimiert und nicht auf die des Mars, die über hundertmal dünner ist und zu 95 % aus Kohlendioxid besteht. Daher addierte man große Sicherheitsaufschläge auf die Simulationsergebnisse, um die Mission abzusichern, was allerdings erhebliche Mengen an Nutzlastmasse verbrauchte.[27] Die neuen Daten aus dem MSL-Eintritt sollen diese Aufschläge eliminieren oder zumindest stark senken, damit man so die wissenschaftliche Nutzlast zukünftiger Marsmissionen steigern kann.[27]
Die Kapsel enthielt wie das Marschflugmodul kein eigenes Kommunikationssystem, besaß allerdings drei Antennen im Bereich der Fallschirmhalterung. Im X-Band waren zwei baugleiche Modelle vorhanden, die „Parachute Low-Gain Antenna“ (PLGA) und die „Tilted Low Gain Antenna“ (TLGA), welche für einen Teil der Kommunikation während des Marschfluges zuständig waren.[21] Beide unterschieden sich lediglich durch ihre Position an der Struktur, wobei sie so angeordnet waren, dass sie die toten Winkel der anderen Antenne füllen konnten. Die Richtwirkung der Konstruktion war sehr gering, so dass keine genaue Ausrichtung nötig war, was allerdings eine geringe Datenrate bedingte. Der Antennengewinn schwankte zwischen 1 und 5 dB, da es durch die Fallschirmhalterung zu erheblichen Reflexionseffekten kam.[21] Zu Beginn der Mission (nahe der Erde) konnten Daten noch mit 1,1 kBit/s empfangen und mit 11 kBit/s gesendet werden, mit zunehmender Entfernung sank die Datenrate jedoch kontinuierlich bis auf wenige Dutzend Bit/s ab.[21]
Während der ersten Landephase fand die UHF-Kommunikation über die „Parachute UHF Antenna“ (PUHF) statt. Hierbei handelte es sich um eine Anordnung von insgesamt acht kleinen Patchantennen, die rundherum an der äußeren Verkleidung der Fallschirmhalterung angebracht waren. Hierdurch ergab sich ein im Vergleich zur PLGA und TLGA sehr stabiles, omnidirektionales Abstrahl- und Empfangsverhalten, so dass auch bei extremen Fluglagen Daten mit ausreichender Geschwindigkeit übertragen werden konnten.[21] Diese Konstruktion wurde bereits beim Mars-Lander Phoenix erfolgreich erprobt. Der Antennengewinn lag zwischen −5 und +5 dB, wobei eine Datenrate von mindestens 8 kBit/s erreicht wurde.[21]
Abstiegsstufe
BearbeitenDie weitere Abbremsung nach der Abtrennung des Fallschirms etwa 1800 m über dem Grund[28] erfolgte durch die acht Triebwerke der Abstiegsstufe, die jeweils paarweise montiert waren.[29] Das Design basierte auf den Bremstriebwerken der Viking-Lander, wobei die verwendeten Materialien und Steuersysteme dem aktuellen Stand der Technik angepasst wurden. Jedes Triebwerk konnte 0,4 bis 3,1 kN Schub generieren und erzielte dabei einen spezifischen Impuls von bis zu 221 s.[29] Zudem war auch ein Betrieb mit sehr geringer Leistung möglich (1 % des möglichen Treibstoffflusses), um die Triebwerke aufzuwärmen und deren Ansprechverhalten zu verbessern. Der Treibstoffverbrauch betrug im Schnitt etwa 4 kg pro Sekunde,[29] bei einem Vorrat von 390 kg.[17] Zur Energieversorgung der Stufe wurden zwei Li-FeS2 Thermalbatterien verwendet.
Um die Sinkgeschwindigkeit und Entfernung zum Boden korrekt zu berechnen, besaß die Abstiegsstufe ein eigenes Radarsystem, das an einem separaten Ausleger montiert war und den Namen „Terminal Descent Sensor“ (TDS) trug. Es bestimmte diese Parameter ab einer Höhe von 4 km und einer Geschwindigkeit von unter 200 m/s.[29] Hierzu wurde das im Ka-Band (36 GHz) gesendete 12 W starke Peilsignal über sechs kleine Antennen abgestrahlt, die einen Öffnungswinkel von je 3° besaßen.[29] Durch diese Anordnung konnte das Navigationssystem die Bewegung in allen drei Achsen präzise errechnen, was für den Einsatz des SkyCranes unabdingbar war. Das System wog 25 kg und benötigte während des aktiven Betriebs 120 W elektrische Leistung.[29]

Der bemerkenswerteste Teil der etwa 2,4 Tonnen[17] schweren Abstiegsstufe war der sogenannte SkyCrane-Komplex. Dieser wurde etwa 20 Meter über der Marsoberfläche aktiviert und ließ Curiosity an mehreren etwa acht Meter langen Seilen wie bei einem Baukran auf die Oberfläche hinab.[29] Dieses neue Verfahren ermöglichte gegenüber der sonst üblichen Airbag-Methode das sichere Aufsetzen des schweren Rovers auch auf ungünstigem Terrain und verringerte die Anforderungen an dessen Erschütterungsresistenz erheblich (Sinkgeschwindigkeit: 0,75 m/s statt ca. 12 m/s bei den MER-Rovern oder etwa 29 m/s bei Beagle 2).[29] Die Aufprallenergie war so gering, dass das Fahrwerk diese komplett absorbieren konnte, wodurch keine zusätzlichen Landevorrichtungen nötig waren, wie etwa spezielle stoßgedämpfte Beine, wie sie zum Beispiel bei den Viking-Landern eingesetzt wurden. Das Aufsetzen des Rovers wurde über Kraftsensoren erfasst, da der Zug auf die Seile beim Aufsetzen auf den Boden deutlich nachlässt.[29] Durch diese Messungen konnte auch festgestellt werden, ob Curiosity schräg oder gerade auf dem Untergrund aufsetzte. Nachdem der Rover sicher auf der Marsoberfläche stand, wurden die Seile pyrotechnisch gekappt, und die Abstiegsstufe erhöhte nochmals die Triebwerksleistung, um in etwas über hundert Metern Entfernung von Curiosity eine Bruchlandung auszuführen. Der Absetzvorgang bis zum Aufsetzen des Rovers dauerte insgesamt 13 Sekunden.[29]
Die Abstiegsstufe war zusammen mit dem Rover selbst der einzige Teil, der über ein eigenes Kommunikationssystem verfügte. Konkret stand der Stufe im Bereich des X-Bands ein Transmitter, genannt „Small Deep Space Transponder“ (SDST), zur Verfügung. Hierbei handelte es sich um eine Weiterentwicklung der Version, die schon bei den Mars Exploration Rovern verwendet wurden.[21] Die beiden wesentlichen Verbesserungen waren eine erhöhte Signalstabilität bei Temperaturschwankungen und ein wesentlich geringerer Leck-Effekt.[21] Der SDST war für die Kommunikation während des gesamten Marschfluges und der Landephase verantwortlich. Im Rover befindet sich ein baugleiches Modell, das allerdings erst nach der Landung aktiv wurde. Signale konnten bis zu einer Schwelle von −70 dBm empfangen werden, die Bandbreite war, je nach Signalstärke und Einstellung, auf 20 bis 120 Hertz ausgelegt.[21] Die Datenrate konnte durch die Elektronik in Abhängigkeit von der Signalqualität automatisch zwischen 8 und 4000 Bit pro Sekunde eingestellt werden.[21] Das System wog 3 kg und benötigte bis zu 15 W Leistung.
Da die Signale des SDST für den Versand von Daten zu schwach waren, wurden diese zuerst vom sogenannten „Traveling Wave Tube Amplifier“ (TWTA) verstärkt. Kernelement war eine Wanderfeldröhre, wobei das Design eine Abwandlung des MRO-Verstärkers war.[21] Der TWTA benötigte bis zu 175 W elektrische Leistung und hatte eine Sendeleistung von bis zu 105 W. Das System war gegen Unter- und Überspannungsschäden geschützt und wog 2,5 kg.[21]
In der Endphase der Landung, nach der Trennung von der Kapsel, sorgte die „Descent Low Gain Antenna“ (DLGA) für eine Verbindung mit der Bodenstation auf der Erde. Hierbei handelte es sich allerdings eher um einen offenen Hohlleiter als um eine spezielle Antenne.[21] Dies war nötig, da es sich hier auch um das Signalverbindungsstück zwischen Abstiegsstufe und den Antennen der höheren Stufen handelte. Somit verhielt sich die Antenne solange als normaler Hohlleiter, bis die Trennung von der Kapsel erfolgte und so das Ende freigelegt war.[21] Der Antennengewinn konnte zwischen −5 und +8 dB schwanken, da es je nach Fluglage zu vielfältigen Reflexionen und Interferenzen an den nahen Geräteteilen kam. Die Masse der „Antenne“ betrug 0,45 kg.[21]
Nach Abtrennung der Kapsel ging für das UHF-Kommunikationssystem der Kontakt zur PUHF-Antenne verloren, so dass anschließend die „Descent UHF Antenna“ (DUHF) eingesetzt wurde, damit die Datenverbindung in diesem Frequenzband aufrechterhalten werden konnte.[21] Der Antennengewinn war aufgrund von Reflexionen und Interferenzen an der Sonde extrem volatil, mit einer Schwankung zwischen −15 und +15 dB.[21]
Technik des Rovers Curiosity
BearbeitenVergleich zu früheren Mars-Rovern
Bearbeiten

| Curiosity | MER | Sojourner | |
|---|---|---|---|
| Startjahr | 2011 | 2003 | 1996 |
| Masse (kg) | 900 | 174[30] | 10,6[31] |
| Abmessungen (Meter, L×B×H) | 3,1 × 2,7 × 2,1 | 1,6 × 2,3 × 1,5[30] | 0,7 × 0,5 × 0,3[31] |
| Energieerzeugung (kWh/Sol) | 2,9 | 0,3–0,9[32] | max. 0,1[33] |
| Wissenschaftliche Instrumente | 10 | 5 | 4[31] |
| Max. Geschwindigkeit (cm/s) | 4 | 5[34] | 1[35] |
| Daten (MB/Tag) | 19–31 | 6–25[36] | max. 3,5[37] |
| Rechenleistung (MIPS) | 400 | 20[38] | 0,1[39] |
| Arbeitsspeicher (MB) | 256 | 128[38] | 0,5[39] |
Energieversorgung
Bearbeiten
Im Gegensatz zu früheren Rover-Missionen auf dem Mars wird Curiosity statt mit den üblichen Solarzellen mit einer Radionuklidbatterie betrieben, die als „Multi-Mission Radioisotope Thermoelectric Generator“ (MMRTG) bezeichnet wird. Diese Lösung ist unabhängig vom Wetter, bietet eine stabile thermische Umgebung für die Systeme im Rover und sorgt für höhere Mobilität.[40] Zudem ist die Konstruktion leichter als ein Solarpanel mit gleicher Leistung, so dass mehr Raum für wissenschaftliche Instrumente bleibt.[40] Die 43 kg schwere Batterie enthält 4,8 kg Plutoniumdioxid, das durch den α-Zerfall des enthaltenen Plutonium-Isotops 238Pu (Halbwertzeit: 87,7 Jahre) anfänglich 2000 W Wärmeleistung abgibt.[41] Diese Wärme wird mittels TeSbGeAg- und PbTe-Thermoelementen[20] in 110 W elektrische Leistung umgewandelt,[42] was einer Effizienz von rund 6 % entspricht. Die Energieversorgung ist für mehr als das Siebenfache[43] der primären Missionszeit ausgelegt. Die erzeugte Gleichspannung liegt bei 28 V, was auch der Spannung des Bordnetzes entspricht. Ein Teil der entstehenden Wärme wird auch verwendet, um das Innere des Rovers auf einer optimalen Betriebstemperatur zu halten. Da die Thermoelemente seit ihrer Herstellung kontinuierlich große Mengen Wärme abgeben, wurde der MMRTG erst wenige Tage vor dem Start an dem dafür vorgesehenen Trägersystem am Heck von Curiosity angebracht. Zu diesem Zeitpunkt befand sich der Rover bereits innerhalb der Kapsel und auf der Atlas-V-Rakete, so dass das Einsetzen in der Vertical Integration Facility (VIF) stattfinden musste.

Die von Boeing[44] entworfene Konstruktion basiert äußerlich auf der SNAP-19-Batterie, die bereits bei Pioneer 10/11 und Viking 1/2 erfolgreich zum Einsatz kam.[42] Im Inneren werden jedoch acht „General Purpose Heat Source“-Kapseln (GPHS) verwendet, die das gesamte radioaktive Material enthalten und die benötigte Wärme liefern.[41] Diese gelten ebenfalls als erprobt, da sie schon bei den Sonden Cassini-Huygens, Galileo, Ulysses und New Horizons verwendet wurden.
Da das enthaltene Plutonium hochgradig radioaktiv und giftig ist, wurde ein mehrschichtiges Sicherheitskonzept implementiert, um dessen Freisetzung bei einem Fehlstart der Rakete zu verhindern. Die Plutoniumdioxid-Keramik[45][46] zerfällt bei mechanischer Belastung nicht zu feinem Staub, sondern in größere Bruchstücke, die eine Aufnahme von Radionukliden über die Atmung in die Lunge verhindern. Außerdem kann das Material der Hitze beim Wiedereintritt widerstehen, ohne zu verdampfen, und reagiert chemisch kaum mit anderen Stoffen wie Luft oder Wasser. Innerhalb der Batterie ist die Plutoniumkeramik in acht einzelnen Kapseln untergebracht, die alle über einen eigenen Hitzeschild und aufprallsicheres Gehäuse verfügen.[45] Innerhalb dieser Kapseln ist die Keramik von mehreren Lagen unterschiedlicher Materialien umgeben (darunter Iridium und Graphit), die durch ihren hohen Schmelzpunkt und ihre große Resistenz gegenüber Korrosion den Austritt radioaktiver Stoffe nach einem Aufschlag verhindern sollen.[45]
Die NASA gab die Wahrscheinlichkeit eines Unfalls mit Freisetzung von Radioaktivität mit 0,4 % an.[47] In diesem Fall sollte die individuelle Belastung mit Radioaktivität im Startgebiet jedoch nur bei 0,05–0,10 Millisievert liegen (entspricht etwa einer Röntgenuntersuchung des Kiefers).[47] Bei vergangenen Fehlstarts mit geschützten amerikanischen Radionuklidbatterien (ALSEP und Nimbus B1) erwiesen sich die Schutzmaßnahmen jedoch als so zuverlässig, dass überhaupt keine freiwerdende Radioaktivität festgestellt werden konnte.[48]
Dennoch gab es Kritik an diesem Energieversorgungskonzept, da eine Verteilung von 238Pu bei einem Fehlstart nicht ausgeschlossen werden konnte.
Um auch mehrere energieintensive Systeme, wie zum Beispiel das SAM-Instrument, für einen kurzen Zeitraum parallel betreiben zu können, verfügt Curiosity über zwei zusätzliche Lithium-Ionen-Akkumulatoren. Diese besitzen eine Kapazität von jeweils 42 Amperestunden, liefern eine Ausgangsspannung von 28 V und sind für mehrere Ladezyklen pro Marstag ausgelegt.[49]
Elektronik
BearbeitenDie Datenverarbeitung des Rovers findet im sogenannten „Rover Compute Element“ (RCE) statt, von dem eine baugleiche Reserve-Einheit vorhanden ist. Der zentrale Bestandteil eines RCE ist ein RAD750-Prozessor von BAE Systems, der eine Taktrate von 200 MHz aufweist und etwa 400 Millionen Instruktionen pro Sekunde verarbeiten kann.[50][51] Der Prozessor, der sich in einem CCGA-Gehäuse befindet, ist für eine Gesamtstrahlendosis von einem Mrad spezifiziert und kann innerhalb einer sehr großen Temperaturspanne (−55 °C bis 125 °C) arbeiten.[51] Darüber hinaus ist seine Struktur, die eine Breite von 150 nm aufweist, gegen den Latch-Up-Effekt immun.[51] Zur Speicherung von Daten steht ein Arbeitsspeicher mit einer Größe von 256 MB, ein Flash-Speicher mit 2 GB und ein EPROM mit 256 kB zur Verfügung, wobei alle Teile fehler- und strahlungstolerant ausgelegt sind.[52] Als Betriebssystem kommt VxWorks zum Einsatz, das über 130 Threads verwaltet.[53] Insgesamt wurden 2,5 Millionen Zeilen C-Code für die Missionssoftware geschrieben.[53]
Kommunikation
BearbeitenFür einen illustrierten Überblick siehe auch den Abschnitt Überblick Kommunikationssystem
Zur Kommunikation mit der Bodenstation auf der Erde verfügt Curiosity über zwei Kommunikationskomplexe. Einer arbeitet im UHF-Band (0,4 GHz) und ist für den Empfang von Steuerkommandos und das Senden von Statusdaten zuständig, der andere Komplex arbeitet im X-Band (7–8 GHz) und sorgt für die Übertragung von wissenschaftlichen Daten mit hohem Datenvolumen (bis zu 250 Mbit pro Tag) während der Primärmission. In der Marschflugphase ergänzte es das X-Band-System in seiner Rolle. Dies ist auch der Fall, wenn keine direkte Sichtverbindung zur Erde besteht oder wenn sich der Rover aufgrund eines Systemfehlers im sicheren Modus befindet.

Das UHF-System verfügt über zwei redundante Transmitter, genannt „Electra Lite Transponder“ (ELT), welche alle Bauteile für die Verarbeitung und Erzeugung von Funksignalen enthalten (Verstärker, Oszillator, Transponder etc.).[21] Hierbei handelt es sich um eine leichtere und weniger leistungsfähige Variante des Systems, welches schon beim Mars Reconnaissance Orbiter zum Einsatz kam. Die Datenrate beim Senden, welche automatisch in Abhängigkeit von der Signalqualität von der Elektronik gewählt wird, beträgt bis zu 2 Mbit/s, beim Empfang bis zu 256 kBit/s.[21] Jeder Transmitter wiegt 3 kg und benötigt bis zu 96 W elektrische Leistung.
Die „Rover UHF Antenna“ (RUHF) ist die primäre Antenne von Curiosity zur Übertragung wissenschaftlicher Daten an die Bodenstation auf die Erde. Hierbei dient das UHF-Kommunikationssystem des Mars Reconnaissance Orbiters als Relaisstation.[21] Dieser empfängt die Signale von Curiosity, verarbeitet diese und überträgt sie dann über ein Hochleistungssendesystem im X-Band an die Antennen des Deep Space Network auf der Erde. Wäre der Mars Reconnaissance Orbiter beim Eintreffen des Rovers nicht mehr funktionsfähig gewesen, hätte Mars Odyssey als Relais verwendet werden können, wobei die Datenrate etwas geringer ausgefallen wäre.[21] Darüber hinaus ist auch das UHF-System der ESA-Sonde Mars Express in der Lage, mit Curiosity zu kommunizieren, allerdings ist dies nur kurzzeitig während eventueller Notsituationen vorgesehen.[21] Die RUHF ist als Wendelantenne ausgeführt und erreicht aufgrund ihrer schwachen Richtwirkung in einem großen Winkelbereich einen Antennengewinn von etwa 3 bis 6 dB. Daten werden bei 437 MHz empfangen, gesendet wird bei 401 MHz.[21]

Im Bereich des X-Bands steht Curiosity ein Transmitter, genannt „Small Deep Space Transponder“ (SDST), zur Verfügung, welcher baugleich zu dem in der Abstiegsstufe ist.[21] Der SDST an Bord von Curiosity wird normalerweise nicht für die Kommunikation während des Marschfluges verwendet, da die Signale bedeutend schwächer sind als die der Abstiegsstufe. Sollte der SDST oder Verstärker dieser Stufe jedoch ausfallen, kann das Sende-Empfangs-System des Rovers auch per Schalter an die Antennen der anderen Stufen angeschlossen werden.[21] Allerdings wird das bereits um 85 % schwächere Signal durch diese Schaltung nochmals um 6 dB gedämpft, so dass die Datenrate um ein Vielfaches geringer ausfällt.[21]
Da die Signale des SDST für den Versand von Daten zu schwach sind, werden diese zuerst vom sogenannten „Solid State Power Amplifier“ (SSPA) verstärkt. Hierbei handelt es sich um einen Transistorverstärker (MESFET/HEMT-Kombination), dessen Design eine Weiterentwicklung der entsprechenden Systeme der Mars Exploration Rover ist.[21] Er kann das Signal auf bis zu 15 W verstärken, wobei hierfür bis zu 62 W elektrische Leistung benötigt wird. Der Verstärker wiegt 1,4 kg, ist für Strahlendosen von bis zu 100 krad spezifiziert und wurde von General Dynamics hergestellt.[21]
Die HGA („High Gain Antenna“) sorgt für den Empfang von Kommandos und das Senden von Statusdaten im X-Band. Es handelt sich um eine Patchantenne mit sehr starker Richtwirkung, weswegen sie sehr präzise auf die Erde ausgerichtet werden muss.[21] Allerdings lassen sich so trotz geringer Verstärkerleistung relativ hohe Datenraten erzielen. Sie misst 28 cm im Durchmesser und wiegt insgesamt 8 kg. Der Antennengewinn beträgt bei optimaler Ausrichtung im Sendebetrieb 26 dB, beim Empfang 21 dB.[21] Bereits eine Fehlausrichtung von 8° führt zu einer Halbierung des Gewinns, bei mehr als 12° Abweichung ist keine Kommunikation mehr möglich. Die Datenrate beim Senden beträgt mindestens 160 Bit/s oder 800 Bit/s, je nach Größe der Empfangsantenne auf der Erde. Kommandos können typischerweise mit einer Rate von 190 Bit/s empfangen werden.[21] Gesendet wird bei einer Frequenz von 8395 MHz, der Empfang findet bei 7183 MHz statt.
Sollte es ein Problem mit der HGA geben (z. B. durch einen Defekt der Ausrichtungsmechanik), steht die sogenannte „Rover Low Gain Antenna“ (RLGA) als Reserve zur Verfügung. Diese besitzt praktisch keine Richtwirkung, was die Kommunikation aus fast jeder Lage heraus ermöglicht.[21] Allerdings reduziert diese Eigenschaft die Datenrate sehr stark (bis auf wenige Bit pro Sekunde unter schlechten Bedingungen), so dass diese Antenne nur in Notfällen verwendet wird. Aufgrund des extrem schwachen Sendesignals können nur unter sehr guten Bedingungen überhaupt Daten an die Bodenstation gesendet werden (mit einigen Dutzend Bit pro Sekunde).[21] Die RLGA ist im Wesentlichen ein offener Hohlleiter mit einem speziellen Aufsatz, so dass damit ein breites Antennendiagramm erzeugt werden kann.
Antriebssystem
BearbeitenZur Fortbewegung auf der Marsoberfläche kommen insgesamt sechs Räder zum Einsatz, die symmetrisch an zwei Rohrgestellen („Bogies“) befestigt sind, welche wiederum durch eine einzelne Achse im Schwerpunkt des Rovers miteinander verbunden sind. Als Material kommt bei dem Gestell Titan zum Einsatz, während die Räder aus Aluminium bestehen, welches auf der Oberfläche so dünn ist, dass es sich in etwa wie konventionelle Autoreifen aus Gummi verhält.[54] Jedes Rad misst 51 cm im Durchmesser und weist eine Profiltiefe von etwa 1,3 cm auf.[55] Rechteckige und quadratische Aussparungen ergeben pro Rad einen Morsecode, der später als Abdruck im Marsboden zu sehen sein wird und für Jet Propulsion Laboratory steht. (J . - - - P . - - . L . - . .)[56] Pro Rad ist ein dedizierter, bürstenloser Gleichstrommotor vorhanden, der für insgesamt 45 Mio. Umdrehungen während der gesamten Mission ausgelegt ist.[57] Gelenkt wird der Rover über die beiden Radpaare vorne und hinten, welche sich um 90° nach links oder rechts drehen können, wodurch sich Curiosity auch auf der Stelle um 360° drehen kann.[58] Das Antriebssystem ist in der Lage, den Rover mit bis zu vier Zentimeter pro Sekunde fortzubewegen, und ermöglicht diesem, Neigungen von bis zu 45° (in alle Richtungen) sowie bis zu 75 cm hohe Hindernisse zu bewältigen.[58][59] In der Praxis auf dem Mars werden diese Spezifikationen jedoch aus Sicherheitsgründen nicht voll ausgereizt, weswegen man von einer effektiven Geschwindigkeit von 0,15 bis 0,45 cm/s ausgeht, was einer Fahrstrecke von 100 bis 300 Metern pro Tag entspricht.[59] Auch ist die Steuerungssoftware so programmiert, dass sie Neigungen von über 30° vermeidet.[58] Um den Aufwand für das Bodenteam zu reduzieren, ist Curiosity mit einer Software ausgestattet, die autonom Hindernisse erkennen und umfahren kann. Hierdurch wird der Rover effektiv deutlich schneller, da nicht jeder Bewegungsbefehl von der Erde gesendet werden muss (Signallaufzeit: bis zu 40 Minuten). Zur Erfassung der benötigten Umgebungsdaten sind vier sogenannte „Hazard Avoidance Cameras“ (Hazcam) am unteren Teil des Rovers angebracht.[60] Es handelt sich jeweils um ein Paar aus zwei Schwarz-Weiß-Kameras, die zusammen ein Sichtfeld von 120° abdecken und 3D-Aufnahmen anfertigen können.[60] Somit kann die gesamte Umgebung bis in vier Meter Entfernung nach Hindernissen durchsucht werden.
Roboterarm und Probengewinnung
Bearbeiten
Curiosity besitzt einen etwa zwei Meter langen Roboterarm an seiner Frontseite, der die Bezeichnung „Sample Acquisition, Processing, and Handling“ (kurz „SA/SPaH“) trägt. Durch seine drei Gelenke ähnelt dessen Auslegung dem menschlichen System aus Schulter-, Ellbogen- und Handgelenk, wodurch er sehr beweglich ist (fünf Freiheitsgrade). Diese Eigenschaft wird benötigt, um einige Instrumente nahe an die zu untersuchenden Objekte heranzubringen. Außerdem verfügt der Arm an seinem Ende noch über ein Bohrsystem, eine Baggerschaufel, eine Bürste und ein Sieb mit verschiedenen Auffangbehältern. Durch diese Ausrüstung können auch tiefere Boden- und Gesteinsschichten für Analysen zugänglich gemacht werden. Die beiden wissenschaftlichen Instrumente, APXS und MAHLI, sind vom Gehäuse entkoppelt, so dass man Probleme durch die Vibrationen während des Bohrens vermeiden kann. Alle Vorrichtungen sind an einem drehbaren Kopfelement am Ende des Arms angebracht. Der wichtigste Teil des Arms ist der Bohrer an der Spitze. Dieser kann bis zu 5 cm tiefe Löcher in Felsen bohren, wobei das Material des Bohrkerns pulverisiert und zum CHIMRA Filtersystem gefördert wird.[61] Neben der drehenden Bewegung wird der Bohrkopf nach dem Prinzip einer Schlagbohrmaschine bis zu 30-mal pro Sekunde gegen das Zielgestein gehämmert, damit dieses besser durchdrungen und zerkleinert werden kann. Hierbei kann die Einschlagsenergie zwischen 0,05 und 0,8 Joule liegen.[61] Sollte sich ein Bit festfahren und nicht wieder herausgezogen werden können, so kann dieses abgetrennt und durch ein neues Bit ersetzt werden.[61] Hierfür befinden sich zwei Reserve-Bits in entsprechenden Halterungen an der Vorderseite des Rovers. Das gesamte Bohrsystem ist für 81 Bohrvorgänge spezifiziert und kann in einem Temperaturbereich von +70 °C bis −70 °C arbeiten.[61]
Für die erste Aufbereitung der Bohrproben ist das „Collection and Handling for Interior Martian Rock Analysis“-System (CHIMRA) zuständig, welches sich am vorderen Ende des Arms befindet. Es kann mit Hilfe mehrerer Siebe Partikel größer als 150 µm oder 1000 µm (je nach Einstellung) aus der Probe entfernen und das übrig gebliebene Material in mehrere kleine Auffangbehälter leiten.[62] Darüber hinaus ist eine Schaufel vorhanden, mit der loser Marsboden auch direkt ohne Bohrvorgang aufgenommen werden kann.[62] Alle Fördervorgänge werden durch Drehen und Kippen des Arms ausgelöst, an einigen Stellen sind auch vibrierende Elemente untergebracht, damit man das Anhaften von Material im Inneren von CHIMRA vermeiden kann, da dieses nachfolgende Proben verunreinigen könnte.[62]
Da Curiositys Instrumente hochempfindlich bei der Detektion von organischen Substanzen sind, muss sichergestellt werden, dass die Messergebnisse nicht durch irdische Verunreinigungen oder Beschädigungen verzerrt werden.[63] Daher befinden sich an der Vorderseite des Rovers fünf etwa faustgroße Behälter, die mit einer amorphen Siliciumdioxid-Keramik und einer kleinen Menge zweier Fluoraromaten gefüllt sind.[63] Letztere können von den Instrumenten zwar wahrgenommen werden, kommen aber in der Natur gewöhnlicherweise nicht vor. Wenn der Keramikblock also angebohrt wird, können anhand von Differenzen zwischen erwarteten und tatsächlichen Messergebnissen Kontaminationen und Verluste innerhalb des Förder- und Analysesystems erfasst werden.[63] Somit können auch ungewöhnliche Messergebnisse sicher als Fehler oder als Tatsache identifiziert werden.
Mast
Bearbeiten
Ein auffälliges Merkmal von Curiosity ist der 1,1 Meter[60] hohe Mast (auch als Remote-Sensing-Mast bezeichnet) an der vorderen linken Ecke des Chassis. Um Platz zu sparen, war er während des Marschfluges nach hinten geklappt und wurde erst nach der Landung in eine aufrechte Position gebracht. Der obere Teil, der fast alle Instrumente enthält, ähnelt in seiner Bewegungsfreiheit dem menschlichen Kopf, wobei er sich allerdings um 360° drehen kann. Folgende wissenschaftliche Instrumente sind am Mast angebracht:
Für die Navigation und Orientierung kommen zu diesen Instrumenten noch zwei „Navigation Cameras“ (Navcams) hinzu. Hierbei handelt es sich um eine Anordnung von insgesamt vier identischen Schwarz-Weiß-Kameras mit einer Auflösung von effektiv je 1024 × 1024 Pixeln.[60] Diese sind je paarweise rechts und links neben der MastCam angebracht und ermöglichen so die Anfertigung von 3D-Bildern.[60] Es sind stets nur je eine Kamera rechts und links aktiv, die anderen beiden sind mit dem Reservecomputer verbunden und daher als Backup gedacht. Die Optik weist eine Brennweite von 15 mm, eine Blendenzahl von f/12 und eine Nahgrenze von 0,5 m auf.[60] Zusammen mit dem CCD-Bildsensor erreicht die Konstruktion eine Auflösung von 0,82 mrad pro Pixel und ein Sichtfeld von 45°. Jede Kamera wiegt 220 g und benötigt im Betrieb etwa 2,2 W elektrische Leistung, wobei alle 5,4 Sekunden eine Aufnahme mit einer Belichtungszeit von bis zu 335 Sekunden gemacht werden kann.[60]
Wissenschaftliche Instrumente
BearbeitenMast Camera (MastCam)
Bearbeiten
Bei der „Mast Camera“ (kurz „MastCam“) handelt es sich um einen Komplex aus zwei hochauflösenden Kameras, die am großen Mast von Curiosity befestigt sind. Mit ihnen sollen die Topologie, feine Oberflächenstrukturen und die Atmosphäre optisch im sichtbaren und nahem infraroten Spektrum untersucht werden.[64] Zeitweise war die Verwendung von Zoomobjektiven im Gespräch, diese konnten aber nicht rechtzeitig einsatzreif gemacht werden, so dass die Brennweite fest eingestellt ist. Beide Kameras verwenden gleiche Bayer-Sensoren, die eine Auflösung von 1200 × 1200 Pixel (1,44 Megapixel) erreichen und in der Lage sind, 720p-Videos mit etwa 10 Bildern pro Sekunde aufzunehmen.[64]
Auch die Elektronik für die Verarbeitung und Zwischenspeicherung der Bilddaten ist baugleich. Sie beinhaltet je Kamera 8 GB Flash-Speicher, welcher Platz für circa 5500 unbearbeitete Bilder bietet.[64] Diese können anschließend in Echtzeit entweder verlustfrei oder verlustbehaftet mit dem JPEG-Verfahren komprimiert werden. Die beiden Kameras unterscheiden sich nur hinsichtlich der verfügbaren Filter, dem Gesichtsfeld und der Brennweite.[64] Letztere liegt bei der Mastcam-34 bei 34 Millimetern, bei der Mastcam-100 sind es 100 mm. Der Sichtbereich ist bei der Mastcam-34 mit 15° deutlich größer als bei der Mastcam-100, welche nur 5,1° erreicht.[64] Beide Kameras können über einen Bereich von 2,1 m bis ins Unendliche fokussieren, womit die Mastcam-100 auf 2 m Distanz Strukturen mit einer Genauigkeit von bis zu 0,15 mm auflösen kann.[64] Darüber hinaus ist ein Filtersystem vorhanden, das gezielte wissenschaftliche Analysen ermöglicht. Die einzelnen Filter sind auf einem Rad vor dem Bildsensor montiert und werden diesem je nach Bedarf durch Drehung vorgeschaltet. Jede Kamera verfügt über acht Filter, wobei die Mastcam-34 eher auf den sichtbaren, die Mastcam-100 eher auf den infraroten Bereich fokussiert ist.[64] Der gesamte MastCam-Komplex wurde von Malin Space Science Systems entwickelt und gebaut.
Chemistry & Camera (ChemCam)
Bearbeiten
Der „Chemistry & Camera“-Komplex (kurz „ChemCam“) besteht aus einem leistungsstarken Laser, einem Spektrometer und einer speziellen Kamera. Diese Gerätekombination ist in der Lage, den Marsboden sowie Felsen und Geröll auf eine Entfernung von bis zu 7 Metern mit hoher Genauigkeit zu analysieren.[65] Hierzu fokussiert man den Laser auf einen kleinen Punkt, um die dortige Materie stark zu erhitzen. So können zum einen die obersten Schichten des Objektes entfernt werden, zum anderen werden die entstehenden Gase und Plasmen durch das optische Spektrometer auf ihre Zusammensetzung hin untersucht.[65] Ein Teil des Komplexes ist am Mast befestigt, so dass eine Vielzahl von Zielen in kurzer Zeit durch dessen gute Beweglichkeit analysiert werden kann. Die schnelle Identifizierung von Gesteinssorten ist somit auch die Primäraufgabe der ChemCam, so dass man interessante Ziele für genauere Untersuchungen mit anderen Instrumenten finden kann. Weitere Aufgaben sind die Analyse von Erosions- und Wettereffekten, die Erfassung von Eis- und Frostspuren sowie die schnelle Erkennung von Hydrogencarbonaten.[65] Bei dem System handelt es sich um eine kooperative Entwicklung unter der Führung des Los Alamos National Laboratory und der CNES (Centre national d’études spatiales), der französischen Raumfahrtagentur mit Sitz in Toulouse.
Der Komplex aus Laser und Spektrometer trägt die Bezeichnung „Laser-Induced Breakdown Spectrometer“ (LIBS) und ist für den wesentlichen Teil der Analyse zuständig. Bei dem Laser handelt es sich um eine wesentliche Innovation in der Raumfahrt, da solche Geräte zuvor entweder nur eine extrem geringe Reichweite aufwiesen oder nur zur Distanzmessung eingesetzt wurden. Der Laser generiert infrarote Pulse (1067 nm) mit einer Länge von 4,5 ns und einer Energie von bis zu 14 Millijoule auf der Probenoberfläche.[65] Er wird stark fokussiert, wodurch eine Wärmeleistung von über 10 MW pro Quadratmillimeter erreicht wird.[65] Diese Energie wirkt hierbei auf einen Punkt mit einem Durchmesser von 0,3 bis 0,6 mm. Durch die hohe Leistungsdichte wird auf der Zieloberfläche ein kleines Plasma erzeugt, dessen abgestrahltes Licht von einem kleinen Teleskop (Durchmesser: 11 cm) eingefangen und in einen Lichtwellenleiter geleitet wird.[65] Dieser endet in drei optischen Spektrometern, welche einen Wellenlängenbereich von 240 bis 850 nm abdecken (fernes UV- bis nahes Infrarot-Licht) und 6144 Spektralkanäle mit einer Auflösung von 0,09 bis 0,30 nm unterscheiden können.[65] In dem Wellenlängenbereich sind die Emissionslinien der wichtigsten Haupt- und Nebenelemente eingeschlossen wie beispielsweise Barium, Strontium und Wasserstoff.
Zur besseren Erfassung des geologischen Kontextes der Probe, ist der „Remote Micro-Imager“ (RMI) vorhanden, der sehr genau erfassen kann, wo genau der Laserstrahl auftrifft.[65] Hierbei handelt es sich um einen CCD-Bildsensor mit 1024 × 1024 Pixeln und einem Sichtfeld von 1,1°. Als Optik wird das Teleskop des LIBS mitverwendet.[65]
Rover Environmental Monitoring Station (REMS)
Bearbeiten
Für allgemeine meteorologische Messungen ist die „Rover Environmental Monitoring Station“ zuständig. Der gesamte Komplex wiegt 1,3 kg und wurde von Spanien in das Projekt eingebracht. Auffälligster Teil des Systems sind die zwei stabförmigen Ausleger am Mast. Jeder besitzt einen Hitzedraht-Windmesser und ein Thermosäulen-Thermometer. Alle Sensoren, mit Ausnahme des UV-Messgerätes und des Drucksensors, befinden sich am Mast des Rovers, die Elektronik ist im zentralen Chassis untergebracht.[66][67]
Es werden sechs Kenngrößen erfasst:
- Die Bodentemperatur in einem Bereich von 150–300 K, mit einer Genauigkeit von besser als 10 K und einer Auflösung von 2 K.
- Lufttemperatur von 150–300 K (−120 bis +30 °C), Genauigkeit besser als 5 K, Auflösung von 0,1 K.
- Luftdruck von 1–1150 Pa, Genauigkeit 10 Pa (20 Pa gegen Ende der Lebensdauer), Auflösung 0,5 Pa. Der Drucksensor befindet sich am Chassis bei der Elektronik des REMS-Komplexes.
- Relative Luftfeuchtigkeit, 0–100 %, Auflösung 1 %.
- Ultraviolettstrahlung: Der Messbereich 210–370 nm sollte von sechs Photodioden erfasst werden (Anm.: Nicht zu verwechseln mit dem UV-Spektrum UV-A bis EUV!): 315–370 nm (UVA), 280–320 nm (UVB), 220–280 nm (UVC), 200–370 nm (total dose), 230–290 nm (UVD), and 300–350 nm (UVE). Bei der Kalibrierung wurde festgestellt, dass die Kanäle UVC und UVD nur ein schwaches Signal liefern. Mit der Mastkamera werden jedoch periodisch Bilder der Dioden gemacht, um die Staubbedeckung zu ermitteln und die Messergebnisse entsprechend zu korrigieren. Das UV-Messgerät befindet sich auf der Oberseite des zentralen Chassis.
- Die Windgeschwindigkeit: Die Windmesser können horizontale Winde im Bereich von 0 bis 70 m/s mit einer Genauigkeit von 1 m/s und einer Auflösung von 0,5 m/s messen. Vertikale Winde können hingegen nur bis 20 m/s erfasst werden. Sie bestehen aus drei 2D-Windwandlern um die 3D-Windrichtung zu ermitteln. Um Messfehler durch die Störungen von Rover, Mast und Auslegern zu kompensieren, werden aerodynamische Simulationen angewandt.
Chemistry & Mineralogy (CheMin)
Bearbeiten
Bei dem CheMin-Instrument handelt es sich um ein weiteres Spektrometer, das gesammelte Bodenproben analysieren soll. Dies geschieht mit Hilfe einer Röntgenquelle, welche die Probe bestrahlt, und einem CCD-Sensor, der über das Phänomen der Röntgenbeugung und Röntgenfluoreszenz deren Zusammensetzung ermittelt.[68] Diese kann Aufschluss über wasserbezogene Einflüsse und eventuelle biologische Signaturen geben. Entwickelt und gebaut wurde das Instrument vom Ames Research Center.
Die angelieferte Bodenprobe wird zuerst durch das CHIMRA-Filtersystem geleitet, damit man zu große oder zu feine Bestandteile, die nicht für die Messung geeignet sind, aussortieren kann. Dazu werden die Probeneinlasstrichter des CheMin (ebenso wie beim SAM) durch Piezoaktoren am unteren Ende dieser Trichter in Vibration versetzt, um die Bodenproben für die anschließende spektrometrische Analyse zu sieben und zu homogenisieren. Das Design der Probeneinlasstrichter wurde durch Laservibrometer überprüft. Partikel mit einer Größe von bis zu 150 µm werden anschließend gleichmäßig in eine Zelle mit einem Durchmesser von 8 mm geleitet.[68] Jede Zelle ist 175 µm dick, wobei die Probe zwischen zwei 6 µm dicke Mylar-Folien oder Kapton-Kunststoff gefüllt wird.[68] Insgesamt sind 27 wiederbefüllbare Zellen auf einem Drehrad angeordnet, so dass das Instrument zwischen mehreren Proben einfach hin- und herschalten kann. Zusätzlich sind noch fünf Zellen mit Referenzmaterial zur Kalibrierung des Instruments vorhanden.[68] Zur Analyse einer Probe wird deren Zelle vor der Röntgenquelle positioniert. Diese erzeugt die Strahlung durch den Effekt der Bremsstrahlung, die entsteht, wenn Elektronen, die aus einer kleinen Menge radioaktiver Cobalt-Isotope stammen, auf Silizium treffen. Die entstandenen Röntgenphotonen werden dann in einen Strahl mit einem Durchmesser von etwa 50 µm konzentriert und auf die Probe gelenkt.[68]
Nachdem die Strahlung die Probe durchdrungen hat, wird diese durch einen UV-sensiblen CCD-Sensor mit 600 × 600 Pixeln gemessen.[68] Dieser analysiert Stärke und Brechung der Photonen, um so Spektren anzufertigen, die Aufschluss über die Zusammensetzung der Probe bieten. Der Sensor mit einer Pixelgröße von 40 × 40 µm fertigt 224 Messungen pro Sekunde an und wird auf −60 °C heruntergekühlt, damit man eine möglichst hohe Empfindlichkeit erreicht.[68] Eine komplette Messung benötigt meist mehrere Stunden, um gute Ergebnisse zu produzieren.[68]
Sample Analysis at Mars (SAM)
Bearbeiten
Beim SAM-Komplex handelt es sich um das schwerste und leistungsfähigste Instrument von Curiosity. Mit einer Masse von 38 kg beansprucht es etwa die Hälfte des gesamten Massenanteils für wissenschaftliche Nutzlast.[69] Mittels dreier kombinierter Sensorsysteme soll es feststellen, inwieweit der Mars als Lebensraum geeignet war und heute ist.[70] Hierzu liegt der Fokus auf der Identifizierung und Analyse von organischen Verbindungen und leichten Elementen sowie der Bestimmung von Isotopenverhältnissen in der Atmosphäre.[70] Entwickelt und gebaut wurde es vom Goddard Space Flight Center, die Spitzenleistung kann bis zu 240 W betragen.[69]
Das SAM kann sowohl Bodenproben als auch Gas aus der Atmosphäre analysieren, wobei das Material zuvor erst aufbereitet werden muss.[71] Für Bodenproben ist dies das „Sample Manipulation System“ (SMS), das über mehrere Siebe verfügt und das gefilterte Material anschließend in einen von 74 Auffangbehältern leitet.[71] Wenn flüchtige Stoffe aus der Probe verdampft werden sollen, kann diese anschließend in einem von insgesamt zwei Öfen erhitzt werden, wo dann eine Ausgasung stattfindet. Da in den Öfen, die jeweils bis zu 40 W elektrische Leistung benötigen, Temperaturen von bis zu 1100 °C erreicht werden, ist auch eine Pyrolyse von organischen Verbindungen möglich.[71] Das Gas aus diesem Prozess, oder auch eine Probe aus der Atmosphäre, wird anschließend in das „Chemical Separation and Processing Laboratory“ (CSPL) geleitet. Hierbei handelt es sich um ein sehr umfangreiches System zur weiteren Vorbereitung der Messung. Es besteht aus knapp 50 Ventilen, 16 Ventilblöcken und mehreren Gas-Absorbern sowie vielfältigen Misch- und Trennsystemen.[71]
Nach der Aufbereitungsphase kann das Gas in eines der drei Messinstrumente eingeleitet werden. Für die Untersuchung organischer Verbindungen eignet sich besonders der Gaschromatograph (GC).[71] Er besitzt sechs Trennsäulen, die jeweils auf eine bestimmte Untergruppe von organischen Verbindungen spezialisiert sind. Mithilfe eines Heliumgasstroms wird das verdampfte Material durch die Trennsäulen gedrückt. Eine Chromatographiesäule ist auch mit einer chiralen Substanz beschichtet, um die Trennung von Enantiomeren zu ermöglichen. Die organischen Substanzen werden nach ihrer Wechselwirkung mit dem Säulenmaterial unterschiedlich schnell durch die Säule transportiert. Ein Wärmeleitfähigkeitsdetektor ermöglicht die Erkennung und Bestimmung anhand der Laufzeit der aus der Säule kommenden Substanzen. Zur weiteren Analyse kann das Gas dann an das „Tunable Laser Spectrometer“ (TLS), vor allem aber an das „Quadrupole Mass Spectrometer“ (QMS) weitergeleitet werden. Bei letzterem handelt es sich um ein Quadrupol-Massenspektrometer, das die Masse der Komponenten des Gases bestimmt. Durch die verwendete Ionisierungsmethode zerfallen die Moleküle in charakteristische Bruchstücke, die zur genauen Identifizierung der organischen Moleküle benutzt werden können.[71] Der Messbereich erstreckt sich hierbei auf Elemente und Moleküle mit einer Atommasse von 2 bis 535 u.[71] Zur Messung der Verbindungen Wasser, Methan und Kohlenstoffdioxid kommt alternativ das Tunable Laser Spectrometer zum Einsatz. Es zeichnet sich durch eine sehr hohe Empfindlichkeit für diese Stoffe aus und kann darüber hinaus auch deren interne Isotopenverteilung bestimmen.[71]
Radiation Assessment Detector (RAD)
Bearbeiten
Das „Radiation Assessment Detector“-Instrument ist für die Messung von kosmischer Strahlung auf der Marsoberfläche entwickelt worden. Der Messbereich ist sehr breitgefächert, so dass erstmals die gesamte Strahlendosis für einen Menschen auf dem Mars ermittelt werden kann, was für spätere bemannte Marsmissionen von großer Bedeutung ist.[72] Auch für Hypothesen zu Leben auf dem Mars sind die Daten zur Strahlungsdosis ein wichtiger Parameter. Darüber hinaus können auch Teilchenschauer genau vermessen werden, wodurch sich aktuelle Modelle zum Aufbau der Marsatmosphäre besser überprüfen lassen.[72] Das Instrument ist im zentralen Chassis untergebracht, wiegt 1,56 kg[73] und benötigt 4,2 W elektrische Leistung.[74] Entwickelt wurde es in einem Gemeinschaftsprojekt des Southwest Research Institute, der Christian-Albrechts-Universität zu Kiel und dem Deutschen Zentrum für Luft- und Raumfahrt.
Die Öffnung des Instruments zeigt exakt nach oben und besitzt ein Gesichtsfeld von 65° zum Einfangen von Teilchen. Gemessen wird mittels drei siliziumbasierter Sensoren mit Pin-Dioden, einem Caesiumiodid-Szintillator und einem plastikbasierten Szintillator speziell für Neutronen. Diese Komponenten befinden sich im Zylinderteil des Instruments, die Elektronik zur Signalverarbeitung befindet sich im unteren Teil des Instruments (im Bild rechts goldfarben). Der Messbereich des RAD-Instruments für leichte Ionen (Z < 9) und Protonen erstreckt sich von 5 bis etwa 1300 MeV pro Nukleon, schwerere Ionen (bis Z = 26) können erst ab 10 MeV detektiert werden. Neutronen sind im Bereich von 5 bis 100 MeV messbar, Gammastrahlung zwischen 0,7 und 5 MeV. Elektronen und Positronen sind ab 0,2 MeV detektierbar, die Obergrenze liegt für Elektronen bei 100, für Positronen bereits bei 1 MeV. Meist können die Teilchen direkt gemessen werden, bei Ionen, Protonen und Elektronen kann die Messung ab einer Energie von etwa 120 MeV jedoch auch indirekt über den Compton-Effekt erfolgen. Aufgrund der begrenzten Energieversorgung des Rovers wurde RAD zumindest bis 2017 nur für höchstens 16 Minuten pro Stunde betrieben.[75]
Mars Descent Imager (MARDI)
Bearbeiten
Bei dem „Mars Descent Imager“ handelt es sich um eine hochauflösende Kamera, die während der letzten Abstiegsphase (unter 4 km Höhe) Bilder der Landezone anfertigte. Hierdurch sollte der genaue Landeort bestimmt und die unmittelbare Umgebung mit hoher Genauigkeit vermessen werden.[76] Das Instrument ist vorne links am zentralen Rover-Chassis angebracht und blickt exakt nach unten. Der Bayer-Bildsensor besitzt 1600 × 1200 Pixel und erreicht – je nach Höhe – eine Auflösung von 2500 bis 0,33 Zentimeter pro Pixel, wobei etwa fünf Bilder pro Sekunde gemacht werden können.[76] MARDI wurde von Malin Space Science Systems gebaut, wiegt 0,66 kg und benötigt bis zu 10 W elektrische Leistung.
Der Sichtbereich der Optik beträgt 90°; allerdings wird nur ein Feld von 70° × 50° abgebildet, wobei die längere Seite parallel zur Flugrichtung verläuft.[76] Da die Daten aufgrund der geringen Kommunikationsbandbreite nicht sofort übertragen werden konnten, ist ein 8 GB großer Zwischenspeicher vorhanden, der bis zu 4000 Rohbilder speichern kann.[76] Mit Hilfe der hochauflösenden Bilder des MARDI-Instrumentes sollte auch der Inertialsensor des Rovers auf seine Genauigkeit hin geprüft werden. Dies geschah durch den Vergleich der Bewegungsmessung des Sensors mit der Bildverschiebung zwischen zwei Aufnahmen der Kamera.[76]
Alpha Particle X-ray Spectrometer (APXS)
Bearbeiten.jpg)
Das „Alpha Particle X-ray Spectrometer“ (kurz APXS) ist ein Alphapartikel-Röntgenspektrometer, das nach dem Prinzip der Röntgenfluoreszenzanalyse und Partikel-induzierte Röntgenemission arbeitet. Der Sensor ist am Arm von Curiosity befestigt und benötigt einen sehr nahen Kontakt zum Boden. Dessen Elemente werden mittels der abgestrahlten Radioaktivität einer kleinen Menge Curium-244, das sich am „Kopf“ des Instruments befindet, in einen angeregten Zustand gebracht.[77] Diese senden daraufhin Röntgenstrahlung aus, die von einem Siliziumdriftdetektor (SDD) aufgefangen werden. Auf diese Weise kann eine Vielzahl von Elementen identifiziert werden und deren Anteil in der Probe erfasst werden. Das APXS soll so die geologische Umgebung des Rovers erkunden und die Prozesse erforschen, die den Boden und das Felsgestein geformt haben. Das Spektrometer ist hierbei besonders im Bereich von salzformenden Elementen wie Calcium oder Brom hochempfindlich.[77] Das APXS wurde von der Canadian Space Agency finanziert und von MDA Space Missions gebaut. Der Siliziumdriftdetektor wurde von der bayerischen Firma KETEK hergestellt.[78]
Das Spektrometer des Instruments kann im Röntgenspektrum von 1 bis 25 keV Messungen vornehmen, wobei eine Auflösung von bis zu 150 eV erreicht wird.[77] Diese Auflösung wird aber nur bei einer Detektortemperatur von unter −45 °C erreicht, weshalb ein Peltier-Element zur Kühlung vorhanden ist.[77] Die Analysezeit reicht von 10 Minuten bis 3 Stunden, je nach gewünschter Empfindlichkeit (der Masseanteil von bestimmten Elementen kann mit einer Genauigkeit von bis zu 10 ppm bestimmt werden).[77] Während der Messung wird eine Kreisfläche mit einem Durchmesser von 1,7 cm bestrahlt, wobei das Instrument leichte Elemente bis in Tiefen von 5 Mikrometer, schwere Elemente bis 50 Mikrometer registrieren kann.[77] Unabhängig von der Dauer der Messung liefert das Instrument am Ende der Analyse 32 kB Daten.
Mars Hand Lens Imager (MAHLI)
Bearbeiten.jpg)
Bei dem „Mars Hand Lens Imager“ (MAHLI) handelt es sich um eine hochauflösende Kamera am vorderen Ende des Arms von Curiosity. Er dient als eine Art Mikroskop und ist zur optischen Untersuchung von sehr kleinen Strukturen gedacht. Der 1600 × 1200 Pixel leistende CCD-Sensor, der von Kodak stammt, kann bei maximaler Annäherung (25 mm Abstand zur Probe) Strukturen mit einer Genauigkeit von bis zu 15 Mikrometer pro Pixel auflösen.[79] Zur Kalibrierung ist neben der üblichen Farb- und Musterpalette auch ein Penny aus dem Jahre 1909 an der Vorderseite des Rover-Gehäuses angebracht.[80] An dem Kameragehäuse selbst sind mehrere LEDs vorhanden, so dass auch in der Nacht Aufnahmen gemacht werden können. Wie bei der MastCam können auch 720p-Videos mit etwa sieben Bildern pro Sekunde aufgenommen werden.[79] MAHLI wurde von Malin Space Science Systems entwickelt und gebaut.
Der CCD-Chip ist als Bayer-Sensor ausgeführt und erreicht eine Quantenausbeute von 30 bis 40 %, je nach Wellenlänge.[79] Die aktive Fläche beläuft sich auf 105 mm², inklusive Sockel misst die komplette Fotoelektronik 20 mm in der Breite und 33 mm in der Länge.[79] Die Belichtungszeit kann zwischen 0,005 und 2 Sekunden gewählt werden. Neben den zwei Paaren von LEDs, die im Bereich des sichtbaren Lichtes arbeiten, sind auch zwei Exemplare für UV-Licht (365 nm) vorhanden, mit denen man im Ultraviolettspektrum fluoreszenzierende Stoffe erkennen kann.[79]
Dynamic Albedo of Neutrons (DAN)
BearbeitenMit Hilfe des „Dynamic Albedo of Neutrons“-Instruments soll die Verteilung von wasserstoffhaltigen Verbindungen im Marsboden in einer Tiefe von bis zu einem Meter ermittelt werden.[81] Hierzu wird der Boden zuerst mit Neutronen beschossen, so dass das energetische Profil der zurückgestreuten Teilchen gemessen werden kann. Dieses Verfahren zum Auffinden von Wasserstoff wird bereits auf der Erde vielfach angewandt, an Bord von Curiosity wird es aber erstmals auf einem anderen Himmelskörper eingesetzt.[81] Das Instrument befindet sich am Heck des Rovers, wiegt knapp 5 kg und wird von Russland bereitgestellt.
Für die Messungen sind zwei getrennte Module verantwortlich: Das DAN-DE enthält die Steuerelektronik und die Sensoren, während das DAN-PNG auf Kommando freie Neutronen mittels der Reaktion 3H + 2H → 4He + n abstrahlt.[81] Bei jedem 1-µs-Puls werden etwa 10 Millionen Neutronen mit einer Energie von 14 MeV pro Teilchen in den Boden abgestrahlt. Die zurückgestreuten Neutronen werden anschließend von zwei 3He-basierten Sensoren vermessen. Diese sind identisch aufgebaut, einer besitzt lediglich eine zusätzliche Cadmium-Abschirmung, mit der er Neutronen mit einer Energie von weniger als 0,4 eV blockiert.[81] Die Sensoren weisen dieselbe Messobergrenze von 1 eV auf. Das DAN-Instrument kann sowohl während der Fahrt als auch bei Stillstand Messungen vornehmen, wobei deren Dauer in letzterem Fall je nach gewünschter Genauigkeit zwischen 2 und 30 Minuten liegt.[81] Die vertikale Wasserstoffverteilung kann mit einer Auflösung von Dezimetern bestimmt werden, in der horizontalen Ebene sind entlang des Weges des Rovers Auflösungen von 50 cm bis 100 m die Regel.[81]
Missionsverlauf bis zur Landung
BearbeitenStart 2011
Bearbeiten
Das Mars Science Laboratory wurde an Bord einer Atlas V-(541)-Trägerrakete mit einer Centaur-Oberstufe am 26. November 2011 um 15:02 UTC gestartet.[1] Hierbei handelte es sich um den ersten Start dieser Atlas-Variante. Als Startplatz diente der Cape Canaveral AFS Launch Complex 41. Während des Fluges mit der „Centaur“ kam es zu unerwartet vielen Ausfällen bei der Telemetrie, was sich aber nicht negativ auf den Missionsverlauf auswirkte: Die Abtrennung des MSL erfolgte etwa 44 Minuten nach dem Start exakt wie vorgesehen.[82]
Flug zum Mars
BearbeitenAm 1. Dezember 2011 gab das JPL bekannt, dass ein geplantes Bahnmanöver nicht am 10. Dezember, sondern etwa zwei Wochen später durchgeführt werden sollte.[83] Grund hierfür war der unerwartet genaue Einschuss in die Mars-Transferbahn durch die Centaur-Oberstufe. Zwei Tage zuvor war es zu Problemen im Navigationssystem gekommen, so dass sich die Sonde in den sicheren Modus versetzte. Grund war ein Fehler in der Software, welche für die Identifizierung von Sternen in den Bildern des Sternensensors zuständig ist. Aus diesem Grund erfolgte die Lageregelung zeitweise nur über die beiden Sonnensensoren, während Ingenieure an einer Lösung des Problems arbeiteten.[84] Die Sonde konnte kurz darauf mit Ausnahme dieses Systems wieder in den normalen Betriebsmodus zurückversetzt werden. Wenig später nahm das RAD-Instrument den Betrieb auf, um Daten über die Strahlungsbelastung während des Marschfluges zu sammeln.[85] Diese Messungen sollen vor allem bei der Planung zukünftiger bemannter Missionen genutzt werden. Am 13. Juli wurde das Instrument wieder abgeschaltet und für den Betrieb auf der Marsoberfläche konfiguriert.[86] Erste Auswertungen ergaben eine gegenüber der ISS deutlich höhere Strahlenbelastung, hauptsächlich durch kosmische Strahlung und weniger durch Emissionen der Sonne.[87]
Am 9. Februar 2012 gab das JPL bekannt, dass die Computerprobleme im Navigationssystem behoben wurden.[88] Ein Fehler in der Software des Speichermanagements führte unter bestimmten Bedingungen zu Fehlern beim Zugriff auf den Befehlscache des Prozessors. Dadurch gingen einige Kommandos verloren, woraufhin sich die Sonde in den sicheren Modus versetzte. Durch eine überarbeitete Software, die in einem Wartungsmodus aufgespielt wurde, konnte dieser Fehler schließlich dauerhaft behoben werden.
Um die wissenschaftliche Arbeit zu beschleunigen, hat die NASA im Juni 2012 das angepeilte Landegebiet von 20 × 25 km auf 7 × 20 km verkleinert.[89] Diese Änderung ermöglicht durch neue Simulationen und Abschätzungen zur Präzision des Landesystems eine Reduktion der Fahrzeit des Rovers zum Hauptforschungsgebiet um mehrere Monate.
Wenige Tage vor der Landung
BearbeitenAm 31. Juli 2012 wurde mit Hilfe des Rovers Opportunity geprüft, ob ein Signal von Curiosity auch direkt von der Erde aus empfangen werden kann.[90] Danach wurde Opportunity für neun Tage programmiert und dann „geparkt“, damit das Funknetzwerk und die Orbiter von Kommunikation mit Opportunity für die zeitkritische Kommunikation mit Curiosity während seiner Landung möglichst frei gehalten werden konnte. Nachdem Curiosity am 6. August gelandet war, hat Opportunity seine Fahrt am 12. August fortgesetzt.[91]
Landung August 2012
Bearbeiten

Das Signal von der Bodenberührung des Rovers wurde am 6. August 2012 um 5:31:45,4 UTC empfangen[2][92] und die erfolgreiche Landung mit Eintreffen eines ersten Bildes um 5:35 Uhr bestätigt. Der Landeplatz liegt etwa 2 km vom Zentrum der angestrebten Landeellipse.[93] Die Signallaufzeit betrug zum Zeitpunkt der Landung 13:48 Minuten für die zu diesem Zeitpunkt gut 248 Mio. Kilometer vom Mars zur Erde.[94]
Als Landeregion wurde nach einer fünfjährigen Beurteilungsphase der Gale-Krater aus über 100 betrachteten Zielen ausgewählt.[95] Man entschied sich für diesen Krater, weil sein Boden sehr tief liegt. Hier haben sich sehr viele Schichten unterschiedlichen Materials abgelagert, darunter auch Tonminerale und Sulfate, die unter dem Einfluss von Wasser entstehen.[95] Diese Schichten könnten unter anderem umfassende Erkenntnisse über die Geschichte des Klimas und der Atmosphäre liefern.[95]
 |
Die folgende Tabelle enthält die wichtigsten Etappen der Landephase. Die Zeitangaben (in UTC) beziehen sich auf die lokale Zeit am Mars.[97][98]
| Zeit | Höhe | Phase | 
|
|---|---|---|---|
| Außerhalb der Atmosphäre | |||
| 05:00:45 | 1609 km | Abtrennung des Marschflug-Moduls | |
| 1440 km | Abwurf der Kontrollgewichte zur Ausrichtung für den Eintritt in die Atmosphäre | ||
| Eintritt | |||
| 05:10:45 | 127 km | Eintritt in die obere Atmosphäre | |
| 29 km | Maximale Erwärmung des Hitzeschilds | ||
| 23 km | Maximale Abbremsung der Kapsel | ||
| Fallschirm-Phase | |||
| 05:15:05 | 11 km | Entfaltung des Fallschirms | |
| 05:15:25 | 9,8 km | Abtrennung des Hitzeschilds | |
| 7,6 km | Aktivierung des Landeradars | ||
| 1,6 km | Abtrennung der Kapsel und des Fallschirms | ||
| Abbremsung | |||
| 1,3 km | Aktivierung der Bremstriebwerke der Abstiegsstufe | ||
| Sky-Crane-Phase | |||
| 20 m | Abseilen von Curiosity | ||
| 05:17:39 | 6 m | Ausklappen des Rover-Fahrwerks | |
| 05:17:57 | 0 m | Bodenkontakt des Rovers | |
| Wegflug | |||
| Abtrennung der Seile und Wegflug der Abstiegsstufe | |||
Erforschung des Mars
Bearbeiten2012
BearbeitenNach der Landung am später sogenannten Landeplatz „Bradbury Landing“ startete die Primärmission von Curiosity mit der Überprüfung der Instrumente und des Rovers. Die bis zum 22. August 2012 am Landeplatz dauernde Inbetriebnahme von Fahrzeug und Instrumenten verlief bis auf einen Windsensor erfolgreich – während der Probennehmer erstmals auf dem Weg zum 400 Meter entfernten Ziel „Glenelg“ an geeignetem Material erprobt wurde.[99]

-
 „Goulburn“
„Goulburn“ -
 „Link“
„Link“ -
 „Hottah“
„Hottah“

.jpg)

Der Rover schaute sich auf dem Weg dorthin einzelne Stellen genauer an und setzte verschiedene Instrumente erstmals ein. Am 19. August (Sol 13), also noch an der Landestelle, wurde eine Aufnahme eines Objektes gemacht, genannt „Goulburn“, das als Teil eines Gewässerbetts interpretiert wurde. Am 2. September (Sol 27) wurde auf Aufnahmen Kies gefunden. Bei der untersuchten Region, genannt „Link“ (Sol 26–28), handelt es sich um einen Schwemmkegel, der aber von mehreren festen Kanälen durchzogen ist, was auf einen regelmäßigen Wasserfluss schließen lässt. Die untersuchte Stelle soll knöchel- bis hüfttief unter Wasser gestanden haben, das sich mit etwa einem Meter pro Sekunde fortbewegte.[100] Einige Tage später, am 14. September (Sol 39), fand der Rover an der sogenannten Stelle „Hottah“, etwas, was als Gewässerbett interpretiert wurde. Mit diesen Objekten konnte zum ersten Mal ein direkter Beweis für die Existenz von wasserführenden Flussläufen auf dem Mars erbracht werden. Dies folgt aus den beobachteten Formen der einzelnen Kiesel, die nicht durch Wind geformt werden können, sondern nur durch fließendes Wasser.
-
 „Jake Matijevic“
„Jake Matijevic“ -
 „Rocknest“
„Rocknest“ -
 „Rocknest 3“ (Sol 57) im „Rocknest“
„Rocknest 3“ (Sol 57) im „Rocknest“ -
 „Et-Then“ (Sol 82) im „Rocknest“
„Et-Then“ (Sol 82) im „Rocknest“ -
 „Burwash“ (Sol 82) im „Rocknest“
„Burwash“ (Sol 82) im „Rocknest“ -
 „Shaler“
„Shaler“
.jpg)





Das nächste Objekt war ein etwa 25 cm hoher und 40 cm breiter, pyramidenförmiger Stein, genannt „Jake Matijevic“. 19.–23. September (Sol 43–47). Am 28. September (Sol 50) war der Rover im Gebiet „Glenelg“ angekommen, wo er sich mehrere Monate aufhielt. Hier stoßen verschiedenartige Bodenformationen aufeinander, wodurch viele Untersuchungen möglich sind, unter anderem am 30. September (Sol 54) der sogenannte Stein „Bathurst Inlet“ und später das etwa 1,5 m mal 5 m großes Sandfeld mit mehreren Steinen, genannt „Rocknest“. Bei „Point Lake“ (Sol 102–111) sollte erstmals der Bohrer eingesetzt werden, doch entschied man sich dagegen und eine längere Suche nach einem geeigneten Objekt begann, und erst gegen Ende Januar 2013 wurde mit der ersten von drei Bohrungen in der Region namens „Yellowknife Bay“ begonnen. Die Abbruchkante von „Shaler“ wurde am 7. Dezember (Sol 120) entdeckt und wenige Tage später am 11. Dezember (Sol 125) erreichte der Rover den südwestlichen Rand der Region „Yellowknife Bay“, in der ausführliche wissenschaftliche Untersuchungen geplant waren. „Yellowknife Bay“ zeichnet sich dadurch aus, dass das Gebiet etwa fünfzig Zentimeter unterhalb der Umgebung liegt.
Mit Hilfe von ersten Messungen mit dem SAM-Instrument konnte im November bestätigt werden, dass der Verlust von leichten Isotopen bestimmter Stoffe einen erheblichen Einfluss auf die Entwicklung des Planeten hatte. So zeigen die Messungen eine fünfprozentige Zunahme von schweren Kohlenstoff-Isotopen gegenüber dem Zeitpunkt, zu dem sich die Marsatmosphäre bildete. Dies ist ein deutlicher Hinweis auf einen Verlust in den offenen Weltraum, da die leichten Isotope in die oberen Schichten der Atmosphäre wandern und dort vom Sonnenwind aufgrund des Fehlens eines globalen Magnetfeldes mitgerissen wurden. Darüber hinaus wurde auch nach Methan gesucht, das nur in sehr geringen Konzentrationen in der Atmosphäre vorhanden ist. Die Messungen lieferten allerdings so geringe Messwerte, dass aufgrund der Ungenauigkeit der Instrumente nicht ausgeschlossen werden kann, dass zum Zeitpunkt der Messung praktisch überhaupt kein Methan im Gale-Krater vorhanden war.[101]
Anfang Dezember wurden bei einer Bodenprobe erstmals alle zur Verfügung stehenden Instrumente eingesetzt. Die Probe zeigte im Wesentlichen eine Zusammensetzung, die bereits von den früheren Rovermissionen bekannt war. Es wurden keine organischen Verbindungen gefunden, allerdings ermöglichten die empfindlicheren Instrumente von Curiosity die Detektion von besonders gering konzentrierten Stoffen und die Messung von Isotopenverhältnissen.[102]
2013
Bearbeiten

Am 17. Januar (Sol 160) überfuhr der Rover Curiosity einen kleinen Stein (3 cm * 4 cm), genannt „Tintina“, und zerbrach ihn. Damit wurde ein Blick auf sein Inneres und dessen Untersuchung möglich. Auffällig ist die weiße Farbe der Bruchfläche, die auf die Anlagerung von Wassermolekülen (Hydratation) hinweist.
-
 Nach dem Schlagwerk-Einsatz
Nach dem Schlagwerk-Einsatz -
 2. Bohrloch bei „John Klein“
2. Bohrloch bei „John Klein“ -
 3. Bohrloch bei „Cumberland“, 19. Mai 2013
3. Bohrloch bei „Cumberland“, 19. Mai 2013



Im Januar wurde das Gebiet „John Klein“ als Ort der ersten Bohrung festgelegt. Am 31. Januar 2013 (Sol 174) wurde die Bohrung begonnen, wobei bis zum 2. Februar (Sol 176) nur das Schlagwerk eingesetzt wurde, mit dem pulverisiertes, oberflächennahes Gestein für das CHIMRA-System gewonnen wurde. Anschließend, am 6. Februar (Sol 180), wurde das erste, nur 2 cm tiefe Bohrloch zu Ende gebohrt. Direkt daneben wurde dann ein zweites Loch, diesmal mit der maximalen Tiefe von etwa 6,5 cm, gebohrt, um auch Material aus größerer Tiefe untersuchen zu können. Ein drittes Bohrloch, diesmal an der Stelle „Cumberland“ (Sol 279) wurde dann etwas weiter entfernt gebohrt.
Die Ursache für die lange Verweildauer des Rovers bei der Stelle „John Klein“ war, dass es am 27. Februar 2013 (Sol 200) ein Problem mit dem Datenspeicher des Computers gab, weshalb der Rover gestoppt wurde. Erst am 23. März (Sol 223) konnten die normalen Arbeiten wieder aufgenommen werden. Da allerdings zwischen dem 8. und 28. April 2013 keine Kommunikation zwischen Mars und Erde wegen einer solaren Konjunktion möglich war[103] stand der Rover dort bis zum Mai und erst danach fuhr er zur Stelle „Cumberland“, wo er das dritte Bohrloch am 279. Sol bohrte.

Mitte Juli 2013 verließ der Rover die Region „Glenelg“ mit dem Ziel im nächsten Jahr den Fuß des zentralen Bergs „Aeolis Mons“ – die NASA nennt ihn „Mount Sharp“ – zu erreichen. Dazu fuhr der Rover pro Tag meist zwischen 50 m und 100 m. Die Begrenzung der täglichen Wegstrecke des Rovers ist darin begründet, dass die Fahrer auf der Erde dem Rover die Fahrtstrecke vorgeben und dazu benötigen sie vom Rover aufgenommenes Bildmaterial in der notwendigen Bildauflösung. Die Software für eine autonome Fahrweise des Rovers war zu diesem Zeitpunkt zwar bereits vorhanden, wurde aber noch nicht eingesetzt.[104], 27. Juli 2013. Erstmals wurde der Rover am 27. August in den Autonomiemodus versetzt, um auf einem Teilstück einer Tagesetappe, aufgrund von während der Fahrt aufgenommenen Bildern, selbständig den genauen Weg zu einem Zielpunkt zurückzulegen und dabei größeren Hindernissen auszuweichen.[105]

Auf der mehrere Kilometer langen Wegstrecke zum „Mount Sharp“ (geplante Ankunft im August 2014) wurden per Satellitenaufnahme fünf Stellen („waypoints“) festgelegt, wo der Rover jeweils mehrtägige wissenschaftliche Untersuchungen ausführen sollte. Am 10. September wurde das erste Ziel erreicht, „Darwin“, eine kleine Senke, wo der Rover an 10 Sols mehrere Stellen untersuchte.[106] Ende Oktober 2013 erreichte der Rover den zweiten „waypoint“, wo er die etwa 30 Meter lange Felskante „Cooperstown“ genauer untersuchte. Anfang Dezember 2013 wurde dann die dritte Stelle erreicht. Viel geforscht wurde hier nicht, das Hauptthema zu diesem Zeitpunkt waren Wartungsprobleme am Rover.
Am 12. März gab das JPL bekannt, dass man in der ersten 6,4 cm tiefen Bohrung Anfang Februar eine große Zahl der sogenannten „Bausteine des Lebens“ gefunden hat. Dies ist ein starker Hinweis darauf, dass der Mars in seiner Vergangenheit Leben beherbergen konnte. Im Detail wurden bei der Analyse mittels SAM und CheMin signifikante Mengen der Elemente Wasserstoff, Sauerstoff, Kohlenstoff, Stickstoff, Phosphor und Schwefel in der Probe gefunden. Diese befanden sich zudem in unterschiedlichen Oxidationszuständen, was auf eine dynamische chemische Umgebung hindeutet, wobei insbesondere die Schwefelverbindungen als Energielieferant für Mikroorganismen, wie z. B. Grüne Schwefelbakterien, gedient haben könnten. Da nicht alle Elemente oxidiert sind, ist die Gesteinsprobe eher gräulich und nicht rostfarben wie die Marsoberfläche. Der Ort der Probenentnahme befand sich darüber hinaus am Rande eines alten Flussbetts, wo ein moderater pH-Wert herrschte und es generell feucht war, was Leben zusätzlich erleichtert haben könnte.[107]
Bei Untersuchungen in der Umgebung der Bohrstelle wurde darüber hinaus ein erhöhter Wasserstoff-Anteil sowohl im Boden als auch auf der Oberfläche festgestellt.[108] Dies lässt darauf schließen, dass auch im Umfeld der Bohrung lebensfreundliche Bedingungen geherrscht haben.
Nachdem bereits frühe Bildanalysen auf ein Flussbett und damit fließendes Wasser hingedeutet haben, wurde diese Annahme mit einer im Mai veröffentlichten Untersuchung weiter bestärkt. Eine im Mai veröffentlichte genaue quantitative Vermessung der gefundenen Kiesel bestätigte diese Annahme nicht nur, es wurden auch deutliche Hinweise für einen ehemals konstanten Wasserstrom über mindestens mehrere Monate gefunden. Demnach könnten sich in Zeiten, als der Mars noch über eine ausreichend dichte Atmosphäre verfügte, komplexe und dauerhafte Flusssysteme ausgebildet haben.[109]
Am 30. Mai wurden Ergebnisse zu der Strahlenbelastung während des Marschfluges des MSL veröffentlicht. Diese stützen sich auf die Messungen des RAD-Instruments, das sich an Bord von Curiosity befindet und während des gesamten Fluges zum Mars Messungen durchgeführt hat. Pro Tag erhielt der Rover eine Dosis von 1,8 Millisievert, wobei nur 3 % der Strahlenbelastung von der Sonne ausging, da diese sich ruhig verhielt und die Eintrittskapsel eine zusätzliche Abschirmung gegen deren eher niederenergetische Strahlung bot. Dementsprechend ging die Belastung hauptsächlich von hochenergetischer Kosmischer Strahlung aus. Die so erhaltene Gesamtdosis wäre zwar während des Fluges für Astronauten nicht tödlich, sie liegt jedoch signifikant über den aktuellen Grenzwerten, die als vertretbar angesehen werden. Ohne weitere Abschirmungen würde eine Marsmission das Krebsrisiko der beteiligten Raumfahrer also massiv erhöhen.[110]
Am 1. August konnte Curiosity als erster Rover auf dem Mars eine Verdeckung des Mondes Deimos durch Phobos mit seiner Telekamera aufnehmen. Die so gewonnenen Daten dienen der weiteren Präzisierung der Bahndaten.[111]
Insgesamt sechs Messungen zur Auffindung von Methan in der Marsatmosphäre wurden vom Oktober 2012 bis zum Juni 2013 durchgeführt, die aber allesamt negativ ausfielen.[112] Doch am 15. Juni 2013 meldete der Rover eine Methankonzentration von bis zu 6 ppbv. Später wurde in den vom Esa-Orbiter Mars Express aufgenommenen Daten in derselben Region am 16. Juni 2013 sogar 15,5 ± 2,5 ppbv gemessen.[113][114] Innerhalb einer Zeitspanne von 60 Sol wurden weitere Messungen vom Rover vorgenommen und auch da waren die Methankonzentrationen erhöht, danach sank der Wert wieder auf den durchschnittlichen Wert von 0,69 ± 0,25 ppbv ab.[115] Als mögliche Quelle wurde ein Eisfeld östlich des Gale Kraters bestimmt – also ganz in der Nähe von Curiosity – das schon länger als ausgetrockneter See angesehen wurde.[116]
Am 12. Oktober veröffentlichte das JPL eine Zusammenfassung über die Erkenntnisse des Landegebiets von Curiosity. So wurde erstmals ein Stein auf der Oberfläche exakt radiometrisch datiert. Zuvor konnte man nur über die Anzahl der Einschlagskrater und des Verwitterungszustandes grobe Abschätzungen über das Alter von Marsgestein vor Ort treffen. Mit Hilfe der Fähigkeiten des Rovers konnte nun eine sichere Altersbestimmung über die Messung von im Stein eingeschlossenem Argon durchgeführt werden. Dieses bildet sich durch den langsamen radioaktiven Zerfall von Kalium und wird freigesetzt, sobald eine Probe ausreichend erhitzt wird. Somit konnte durch die Messung des Verhältnisses zwischen Kalium und Argon das Alter der Probe auf 3,86 bis 4,56 Milliarden Jahre datiert werden, was gut mit den vorherigen Schätzungen übereinstimmt. Bei den Untersuchungen konnten in der Bohrprobe auch organische Stoffe identifiziert werden. Allerdings kann momentan noch nicht ausgeschlossen werden, dass es sich hierbei um Verunreinigungen von der Erde handelt, die bei der Konstruktion in das Messsystem gelangt sind.[117]
Mehrere Wissenschaftler haben sich inzwischen mit den Lebensbedingungen im Landegebiet auseinandergesetzt. Es wurde festgestellt, dass die meisten Materialien erst spät angeschwemmt wurden und sich im Gebiet gesammelt haben. In Kombination mit einer vorteilhaften Zusammensetzung der Tonminerale kann daher davon ausgegangen werden, dass die Region vor etwa vier Milliarden Jahren für mikrobakterielles Leben geeignet war. Darüber hinaus waren diese Bedingungen auch über einen längeren Zeitraum präsent als zuvor angenommen.[117]
Nach einer längeren Einsatzzeit konnten auch die ersten Erkenntnisse zur Strahlenbelastung gewonnen werden. Diese liegt durchschnittlich bei 0,67 Millisievert pro Tag und stammt zu etwa 95 % von der kosmischen Strahlung, da es im Messzeitraum keine Sonnenstürme gab. In Kombination mit Hin- und Rückflug würde ein Mensch während einer Marsmission somit einer Belastung von circa 1.000 Millisievert ausgesetzt sein, was das Risiko einer Krebserkrankung mit Todesfolge um 5 % erhöhen würde. Die momentane Belastungsgrenze der NASA würde eine solche Risikosteigerung nicht zulassen, da Astronauten in ihrer gesamten Laufbahn nicht weiterhin erhöhter Strahlung ausgesetzt sein dürfen, sobald eine dreiprozentige Risikosteigerung erreicht ist. Daher wird eine zukünftige Mission zusätzlichen Strahlenschutz benötigen.[117]
2014
Bearbeiten
Am 20. April konnte Curiosity das erste Bild eines Asteroiden von der Marsoberfläche aus aufnehmen. Auf dem Foto sind die beiden Asteroiden Ceres und Vesta sowie der Marsmond Deimos zu erkennen.[118]

Fünf Tage später wurde ein etwa 2 Zentimeter tiefes Loch in das „Windjana“ genannte Ziel gebohrt. Der Stein ist ein Kandidat für die dritte Probenentnahme und wurde deshalb eingehend untersucht.[119]
In der ersten Julihälfte fuhr der Rover durch die mit gefährlich spitzen Steinen durchsetzte „Zabriskie-Hochebene“. Beschädigungen an den Aluminiumrädern in einem vergleichbaren Terrain machten eine Änderung der Route notwendig, um diesen felsigen Bereich so weit wie möglich zu umgehen. Ein Umweg von 200 Metern zu den weiter entfernten wissenschaftlichen Zielen wurde so in Kauf genommen. Diese vorher nicht erwartete Schwierigkeit konnte letztendlich mit nur kleineren Schäden an den Rädern bewältigt werden.
Ende Juli gab es Probleme mit dem Backup-Computer. Curiosity besitzt zwei identische Hauptcomputer und wurde zu diesem Zeitpunkt von der B-Seite gesteuert, da die A-Seite im Februar 2013 kurzzeitig ausgefallen war. Nachdem die Probleme mit der A-Seite behoben werden konnten, übernahm diese die Aufgabe des Backup-Systems. Nachdem der Rover zwei Tage lang seinen Betrieb unterbrach, wurde bestätigt, dass die A-Seite weiterhin als Backup dienen kann.
Kurz vor dem zweiten Jahrestag der Landung am 6. August erreichte der Rover den Felsuntergrund von Aeolis Mons. Die eigentlichen Ziele lagen noch 3 Kilometer südwestlich, aber in weniger als 500 Meter Entfernung lagen schon die ersten einzeln stehenden Felsen, genannt „Pahrump Hills“. Die geologischen Formationen ändern sich so jetzt von den Strukturen vom Grund des Gale Kraters zu den hügeligen Strukturen am Fuß des Berges.[120]
Am 24. September hat der Bohrhammer ein 6,7 Zentimeter tiefes Loch in einen Basaltstein gebohrt und die so gewonnenen Staubproben eingesammelt. Der gesammelte Staub wurde vorerst in einem Behälter im Roverarm aufbewahrt. Die Bohrprobe ist vom tiefsten Bereich des Berges, später soll in höheren Bereichen dann jüngeres Gestein untersucht werden. Die Untersuchungen dieser Umgebungen sollen ein besseres Verständnis des Ursprungs des Bergs ermöglichen und Hinweise für den Grund seines Wachstums geben.[121]
Im November wurde erstmals eine Übereinstimmung von Messungen aus dem Orbit und denen von Curiosity am Boden bekanntgegeben. Der rötliche Gesteinsstaub von der ersten Bohrung am Fuß des Berges stimmt bei der Zusammensetzung der Minerale gut mit den Ergebnissen aus dem Orbit überein. Der Roverarm hatte eine kleine Prise des Staubs in das CheMin-Instrument (Chemie und Mineralogie) gegeben, wo es untersucht wurde. Die Probe von den „Pahrump Hills“ enthält deutlich mehr Hämatite als frühere Analysen bei dieser Mission. Hämatite sind Minerale aus Eisenoxid und geben Hinweise auf frühe Zustände der Umgebung in der sie entstanden sind. Die Messungen aus dem Orbit waren 2010 vom Mars Reconnaissance Orbiter der NASA gemacht worden.[122]

Mitte November hatte Curiosity die erste Runde um das Felsgestein am Fuß des Bergs abgeschlossen und begann nun in einem zweiten Lauf ausgewählte Ziele genauer zu untersuchen. Ein wichtiger Grund, diese Region für die Mission auszusuchen, war die Erwartung, an den Gesteinen am Fuß des Bergs genauere Hinweise über die Entwicklung der Umwelt auf dem Mars zu finden. Auf seinem ersten Weg durch die „Pahrump Hills“ legte der Rover 110 Meter bei einem Höhenunterschied von 9 Metern zurück. Die verschiedenen Gesteine und deren unterschiedliche Erosion sind bei den Untersuchungen von besonderem Interesse.
In der zweiten Runde sollten Nahaufnahmen und spektroskopische Untersuchungen vom Roverarm mehr Details über die ausgewählten Objekte liefern. Außerdem sollte entschieden werden, ob in einer dritten Runde weitere Bohrungen unternommen werden. Die zu untersuchenden Gesteine sind Sedimente, die sich später zu Gestein gehärtet haben. Als Ursache könnte stehendes oder fließendes Wasser wie auch der Wind in Frage kommen. Die Untersuchungen sollen hierzu neue Aufschlüsse geben.
Vor diesen Untersuchungen wurden die Räder auf einer kleinen Sandablagerung getestet; man möchte besser verstehen, warum die bei früheren Aktionen schwerer zu überwinden waren als erwartet. Darüber hinaus wurde an einer Lösung für den möglichen Ausfall eines Lasers zur Fokussierung des Teleskops in dem ChemCam-Spektrometers gearbeitet. Der kleine Laser verlor an Leistung und sollte durch den Hauptlaser mit wenigen kurzen Pulsen ersetzt werden.[123]
2015
BearbeitenIm Januar fanden Bohrungen an der „Mojave 2“ genannten Probe statt. Es gibt Hinweise auf den Einfluss von Wasser in lange vergangener Zeit und die Probe war saurer als bei vorangegangenen Messungen. Der Bohrhammer wurde dabei mit einer neuen Technik eingesetzt, bei dem weniger Druck auf das Objekt ausgeübt wurde. Die ersten vorläufigen Untersuchen ergaben einen hohen Anteil von Jarosit, einem oxidierten Mineral, das Eisen und Schwefel enthält und in sauren Umgebungen gebildet wird. Offen ist die Frage, ob sich die Sedimente in saurem Gewässer entwickelt haben oder erst durch Überflutungen später.[124]
Am 24. Februar wurde eine weitere Bohrung vorgenommen, um weitere Staubproben zu sammeln und analysieren. Die „Telegraph Peak“ genannte Position liegt in den höher gelegenen Regionen der „Pahrump Hills“ am Fuß des Aeolis Mons. Die Zusammensetzung der Proben hier enthielt mehr Silizium im Verhältnis zu Elementen wie Aluminium oder Magnesium. Am deutlichsten wurde das bei der letzten Probe gegenüber den vorherigen tiefer gelegenen. Ursache könnte eine Auslaugung der Minerale gewesen sein. Die Bohrung war die erste, welche ohne eine vorherige Testbohrung stattfand. Es wurde wieder die Technik eingesetzt, bei der relativ wenig Druck auf das Objekt ausgeübt wurde. Nach den Untersuchungen in den „Pahrump Hills“ sollte der Rover durch ein schmales Tal, genannt „Artist’s Drive“, Richtung höhere Basalt-Regionen des Berges gefahren werden.[125]
Ein vorübergehender Kurzschluss am 27. Februar führte kurzzeitig zur Unterbrechung aller Operationen des Rovers. Der Vorfall passierte, als Proben von der letzten Bohrung im Roboterarm zwischen verschiedenen Geräten transferiert wurden. Die Sicherheitsprozeduren stoppten alle Aktivitäten des Arms.[126] Am 11. März konnte die Probe dann gesiebt und anschließend an das vorgesehene Instrument CheMin gegeben werden. Bei Tests über die vergangenen zehn Tage konnte der Kurzschluss genau einmal reproduziert werden; er dauerte weniger als eine hundertstel Sekunde und unterbrach nicht den Motor.[127]
Untersuchungen mit dem SAM-Instrument (Sample Analysis at Mars) ergaben die ersten Funde von Stickstoff durch Erhitzung von Marssedimenten. Die Proben stammten aus dem früher erforschten „Rocknest“. Der Stickstoff wurde in Form von Stickstoffoxiden gemessen und kann durch das Aufbrechen von Nitraten bei der Erhitzung entstanden sein. Nitrate können von Lebensformen genutzt werden und deren Existenz gibt einen weiteren Hinweis darauf, dass der Mars früher einmal lebensfreundlich gewesen sein kann. Stickstoff liegt normalerweise als Molekül (N2) vor und reagiert nicht mit anderen Molekülen. Das Stickstoffmolekül muss erst aufgespalten werden, um dann andere Verbindungen eingehen zu können. Auf der Erde sind das vor allem biologische Prozesse, aber zu einem kleineren Teil auch Naturereignisse wie Blitze.[128]

Im März berichtete die NASA über Ergebnisse von Messungen des schweren Edelgases Xenon in der Marsatmosphäre. Die Untersuchen waren mit dem SAM-Instrument (Sample Analysis at Mars) vorgenommen worden. Da Edelgase weder mit Elementen in der Atmosphäre noch mit denen im Boden reagieren, sind sie besonders gute Indikatoren für den Zustand der früheren Marsatmosphäre. Xenon ist aber nur in sehr geringen Spuren vorhanden und kann daher nur direkt vor Ort nachgewiesen werden. Planeten verlieren einen bestimmten Bestandteil ihrer Atmosphäre an den Weltraum und insbesondere beim Mars nimmt man an, dass dieser in seiner frühen Phase vor vier bis viereinhalb Milliarden Jahren eine deutlich dichtere Atmosphäre besaß. Leichtere Elemente gehen bei einem solchen Prozess schneller verloren als schwerere. Das gilt auch für die verschiedenen Xenon-Isotope bei einer Atommasse von 124 bis 136. Veränderungen der Verhältnisse dieser Isotope gegenüber der natürlichen Zusammensetzung lassen so Rückschlüsse über die Vorgänge beim Verlust zu. Im Gegensatz zu anderen Gasen können hier Wechselwirkungen mit anderen Elementen ausgeschlossen und somit sehr genaue Daten gewonnen werden. Messungen mit dem SAM-Instrument zeigten nun, dass auch die schweren Isotope während einer heftigen Phase an den Weltraum abgegeben worden sein müssen. Die leichteren Isotope wurden nur ein klein wenig mehr abgegeben als die schwereren. Diese Zusammensetzung war schon früher in auf der Erde gefundenen Marsmeteoriten festgestellt worden.[129]

Am 16. April hatte Curiosity seit seiner Landung insgesamt zehn Kilometer zurückgelegt. In den letzten sechs Monaten hatte er die „Pahrump Hills“ erforscht und begab sich nun auf dem Weg zum „Logan Pass“, einem etwa 200 Meter südwestlich gelegenen Ziel.[130]
Zwischen dem 7. und 13. Mai bekam der Rover Probleme mit dem weichen Untergrund. Bei drei von vier Fahrten drehten die Räder mehr durch als zulässig und wurden gestoppt. Der Computer vergleicht die Messungen der Rotation der Räder mit der Entfernung, die aus aufgenommenen Bildern berechnet wird. Bei zu großen Differenzen wird dann automatisch gestoppt. Diese Vorfälle und weitere Analysen der Panoramabilder aus der Umgeben führten letztendlich zu der Wahl einer neuen Route zu dem „Logan Pass“.[131]
Nachdem der zur Autofokussierung genutzte kleine Laser der ChemCam (Chemistry and Camera) ausgefallen war, gab es Schwierigkeiten, die Aufnahmen in der notwendigen Genauigkeit vorzunehmen. Der Hauptlaser sendet gepulste Laserstrahlen auf ein Gestein, um mit einem Spektrometer das heraus gesprengte und verdampfende Gestein zu vermessen. In den vergangenen Monaten wurden daher letztlich mehrere Messungen mit unterschiedlichen Fokussierungen vorgenommen und zur Erde gesendet, um dort dann die besten Ergebnisse heraus zu suchen. Mit einem neuen Softwareupdate sollte ermöglicht werden, mit mehreren verschiedenen Bildern den Fokussierungspunkt zu bestimmen, um dann nur noch eine Lasermessung vorzunehmen und zur Erde zu schicken.[132]

Im Juni gab es eine längere Zwangspause, da sich die Sonne genau zwischen Mars und Erde befand. Diese Konstellation wiederholt sich alle 26 Monate und führt zu einem zeitweisen Ausfall der Funkverbindung. Anfang Juli befand sich der Rover beim „Marias Pass“ und entdeckte zwei unterschiedliche Gesteinsarten: zum einen den schon aus den „Pahump Hills“ bekannten Geröllton und ein dunkleres, fein eingebettetes Sandgestein. Auf dem Mars wie der Erde geben die verschiedenen Lagen von Sedimentgesteinen Aufschluss über die Umweltbedingungen bei deren Entstehung. Curiosity kletterte dabei eine Steigung von bis zu 21 Grad hinauf.[133]
Mitte Juli entdeckte Curiosity Gestein mit hohem Anteil von Kieselerde, ein Material, welches zu einem großen Teil aus Silizium und Sauerstoff besteht und sich zu Gestein formiert. Auf der Erde ist dieses besser als Quarz bekannt. Die „Elch“ genannte Region liegt etwas unterhalb des vorher untersuchten „Marias Pass“. Neben Silizium wurde mit den Messinstrumenten ChemCam (Chemistry and Camera) und DAN (Dynamic Albedo of Neutrons) auch ein größerer Anteil von Wasserstoff gefunden. Dieses Gestein könnte organisches Material eingeschlossen haben und ist somit von besonderem Interesse für spätere, genauere Untersuchungen. Seit der Rover am 6. August 2012 auf dem Mars gelandet war, hatte ChemCam zu diesem Zeitpunkt 1.000 Proben untersucht und mehr als 260.000-mal seinen Laser eingesetzt. Tests zu dem Kurzschluss im Roverarm ergaben keine weiteren Hinweise auf Probleme, so dass weitere Überprüfungen bei den nächsten wissenschaftlichen Untersuchungen stattfinden würden.[134]

Zum dritten Jahrestag der Landung machte Curiosity am 5. August ein weiteres „Selfie“. Das Bild besteht aus vielen Einzelaufnahmen und wurde so zusammengeschnitten, dass von dem Arm mit der Kamera nur ein kleiner Teil und der Schatten am Boden zu erkennen ist.
Am 12. August beendete der Rover seine Untersuchungen am „Marias Pass“ und machte sich weiter auf den Weg zum Aeolis Mons. Bis zum 18. August legte er 132 Meter zurück; insgesamt seit 2012 eine Strecke von 11,1 Kilometern. Die vorher gesammelten Proben wurden für spätere Untersuchungen weiter mitgeführt. Insbesondere die vom DAN-Instrument gefundenen hohen Anteile von Wasserstoff deuten auf größere Mengen an Wasser unter der Oberfläche hin. Das DAN-Instrument entdeckte unerwartet hohe Werte von Wasserstoff zunächst nur in einem passiven Modus, so dass der Rover noch einmal über diesen Bereich fuhr. Es wurde dann im aktiven Modus durch Beschuss des Bodens mit Neutronen und Messung der Rückstrahlungen wasserhaltiges Material unter einer dünnen, trockeneren Schicht nachgewiesen.[135]



Am 29. September bohrte der Bohrer das achte, etwa 6,5 Zentimeter tiefe Loch in ein Marsgestein, das fünfte seit dem Erreichen des Aeolis Mons. Der angebohrte Stein war ein normaler Sandstein und die Umgebung erweckte den Anschein, dass hier einmal Wasser geflossen sein könnte.[136]
Anfang Oktober gab die NASA bekannt, dass Studien die Existenz von Seen vor Milliarden von Jahren bestätigt haben. Die Struktur der Sedimente am Fuß des Aeolis Mons zeigten eindeutige Hinweise auf eine Entstehung innerhalb von Flüssen und Seen etwa 3,3 bis 3,8 Milliarden Jahren in der Vergangenheit. Es gibt Geröll aus schnell fließenden Flüssen sowie mehrlagige Ablagerungen aus stehenden Gewässern. Diese Sedimente aus den ruhigen Seen formten die Umgebung am Fuß des Berges und weiter hinauf. Dort, wo heute der Berg ist, war früher ein Bassin und dieses zumindest zeitweise mit Wasser gefüllt. Nach Messungen des Mars Reconnaissance Orbiter reichen diese Ablagerungen 150 bis 200 Meter von der Basis des Bergs nach oben, möglicherweise sogar bis zu 800 Meter. Darüber gibt es keine Hinweise auf Schichten, die von Wasser beeinflusst wurden. Die entscheidende Frage ist somit, wie das fließende Wasser existieren konnte. Die Atmosphäre muss wesentlich dichter und die Temperatur wärmer gewesen sein, als es die gängigen Modelle beschreiben. Einiges Wasser mag durch Regen- oder Schneefall an den Hängen entstanden sein, das erklärt aber nicht, wie Wasser über eine geologisch längere Periode flüssig sein konnte.[137]
Nach eingehenden Analysen von mineralhaltigen Adern, die im März 2015 in der „Garden City“ genannten Region untersucht wurden, veröffentlichte die NASA im November erste Ergebnisse. Einige dieser Adern sind bis zu zwei Finger dick und sie verteilen sich kreuzend durch das Gestein. Die Entstehung geht auf trockenere Perioden zurück, in denen das Wasser Substanzen in anderen Zusammensetzungen anschwemmte. Adern, die aus unterschiedlichen Perioden stammen, weisen auch unterschiedliche Zusammensetzungen auf. Es wurden Adern mit Kalziumsulfat und Magnesiumsulfat gefunden; andere waren reichhaltig an Fluor oder Eisen. Diese Messungen wurden durch ein Upgrade des ChemCam-Instruments ermöglicht sowie auch mit Hilfe von etwa 350 Vergleichsmessungen von Erdgestein in einem Testinstrument zum besseren Verständnis der Daten. Die Adern geben aber auch dem bloßen Augen schon Hinweise aufgrund ihrer Geometrie; jüngere Adern setzen sich an den Kreuzungen mit den älteren fort und geben so ein Indiz für das relative Alter.[138]
Als Nächstes bewegte sich Curiosity auf die „Bagnold-Dünen“ zu, eine Region an der nordwestlichen Flanke des Aeolis Mons mit auffallend dunklen Dünen, die zum Teil die Höhe eines zweigeschossigen Hauses und die Fläche eines Fussballfeldes haben. Die „Bagnold-Dünen“ sind aktiv und bewegen sich etwa um einen Meter pro Erdjahr. Aber nicht nur die Bewegung ist von Interesse, sondern auch der Prozess, wie sich Sandstein und später dann Fels aus solchen Dünen gebildet haben kann.[139]
2016
Bearbeiten
Im Laufe der letzten zwei Monate hatte Curiosity verschiedene Dünen untersucht, um herauszufinden, wie der Wind die Sandpartikel bewegt und sortiert. Dazu wurden mehrere Proben gesammelt und in das CHIMRA-Gerät (Collection and Handling for In-situ Martian Rock Analysis) gegeben. Die zweite Probe wurde durch zwei verschiedene Siebe gegeben, um so eine Probe von Sandkörnern in der Größe von 0,15 bis 1 Millimetern zu erhalten. Diese Probe wurde dann an das chemische Labor übergeben. Die Untersuchung dieser aktiven Dünen war die Erste außerhalb der Erde und lieferte Informationen über die Bewegungsprozesse in einer deutlich dünneren Atmosphäre und bei geringerer Schwerkraft als auf der Erde. Darüber hinaus bewegte sich der Rover mit einem Rad in die Düne hinein und nahm das rechts gezeigte Foto auf.[140]
Anfang Februar verließ der Rover die „Namib-Düne“ und bewegte sich in Richtung weiterer Felsformationen. Am Sol 1249 (9. Februar 2016) erreichte Curiosity die Distanz von zwölf Kilometern seit der Landung.
Nach den Dünen machte sich der Rover auf den Weg zum Naukluft-Plateau, den bislang höchstgelegenen Punkt, den der Rover seit der Landung im Gale-Krater im Jahr 2012 erreicht hat. Dort angekommen wurden Untersuchungen an Ablagerungen der Hänge durchgeführt.
Das Naukluft-Plateau war das bislang zerklüfteste Gelände, das der Rover durchfahren musste. Durch Winderosion im Laufe von Millionen Jahren, wurde das dortige Gestein sehr scharfkantig und das Betriebsteam musste diese umfahren, da schon 2013 Schäden an den Rädern identifiziert wurden.
Als Nächstes durchfuhr der Rover ein Gelände, das einem ausgetrockneten See glich und die Räder weniger beanspruchte.
Seit Ankunft auf dem Mars hat der Curiosity 12,7 Kilometer zurückgelegt.
Am 11. Mai 2016 brach für den Rover Sol 1337 an, an diesem Tag begann sein drittes Marsjahr auf dem Planeten. In den vergangenen zwei Marsjahren schwankten die Temperaturen im Gale-Krater zwischen 15,9 Grad Celsius an einem Nachmittag im Sommer und minus 100 Grad Celsius im Winter. Bisher wurden 34 Millionen Wettermessungen vom Rover durchgeführt.
Am 2. Juli 2016 versetzte sich der Rover unerwartet in den Safe-Mode. Dabei werden alle nicht überlebenswichtigen Tätigkeiten eingestellt und der Rover folgt einem fest vorgegebenen Plan, um wieder mit der Erde kommunizieren zu können. Daten aus der Kamerasoftware und der Datenverarbeitungssoftware des Hauptcomputers passten vermutlich nicht zusammen und lösten den Safe-Mode aus. Bereits 2013 hatte sich Curiosity drei Mal in diesen Zustand versetzt. Die NASA verlängerte des Weiteren die Mission um zwei Jahre, beginnend ab dem 1. Oktober 2016.
Am 9. Juli 2016 wurde der Rover wieder zurück in den normalen Betriebsmodus versetzt.[141]
Mit dem Instrument Chemistry and Camera (ChemCam) hat Curiosity bisher mehr als 1400 Objekte anvisiert und untersucht und dabei mehr als 350.000 Schüsse mit dem Laser abgegeben. Mit dem Laser dieses Instruments wird Gestein beschossen. Ein kleiner Teil davon verdampft und dieses Plasma wird anschließend mit der Kamera aus einer Entfernung von bis zu sieben Metern untersucht. Durch das Aufspielen einer neuen Software, kann der Rover nun neue Ziele selbstständiger auswählen.[142]

Am 5. August 2016 hat Curiosity mit der Mastkamera (MastCam) dutzende Bilder für ein 360-Grad Panorama und dabei die Erscheinung "Murray Buttes" am unteren "Mount Sharp" aufgenommen. Die Formation lag auf der geplanten Route des Rovers und ist benannt nach dem ehemaligen Caltech Planetologen Bruce Murray (1931–2013).[143]
Seit dem 6. August 2016 befindet sich der Rover vier Erdenjahre auf der Marsoberfläche und hat seitdem 13,57 Kilometer zurückgelegt und mehr als 128.000 Bilder zur Erde geschickt. An einem Gesteinsbrocken namens "Marimba", hat Curiosity in der Zeit vor dem Jubiläum, die Untersuchung der 17. Bodenprobe vorbereitet.[144] Am 8. September 2016 hat Curiosity mit seiner Mastkamera (MastCam) Bilder von geschichtetem Sandstein bei den "Murray Buttes" aufgenommen. Diese Tafelberge und Spitzkuppen, die sich in dieser Region über die Oberfläche erheben, sind erodierte Überreste von altem Sandstein, der entstand, als Sand von Wind abgelagert wurde, nachdem sich der untere Mount Sharp gebildet hatte. Diese Sanddünen wurden außerdem durch Grundwasser chemisch verändert, begraben und sind wieder ausgegraben worden und haben die Landschaft gebildet, wie sie aktuell auf dem Mars zu sehen ist. Die neuen Bilder stellen die letzte Station von Curiosity in den Murray Buttes dar, wo der Rover seit etwas mehr als einem Monat fährt. Seit dieser Woche hat Curiosity diese Region in Richtung Süden verlassen und ist auf dem Weg nach draußen bis zur Basis der letzten Spitzkuppe gefahren. An diesem Ort startete der Rover seine letzte Bohrkampagne (am 9. September). Nach Abschluss dieser Bohrungen wird Curiosity weiter südlich und höher auf den Mount Sharp fahren.[145]
Am 14. September 2016 hat Curiosity einen weiteren Bohrversuch unternommen, der allerdings wegen eines Kurzschlusses abgebrochen werden musste. Dieser Versuch wurde am 18. September 2016 wiederholt und erfolgreich abgeschlossen. Anschließend wurden Bodenproben aus dieser Bohrung in das interne Labor gebracht. Diese Bohrstelle, die insgesamt 14. für den Rover, befindet sich in einem Gebiet, das hauptsächlich aus Schlammstein besteht, der aus Schlamm gebildet wurde, der sich am Grund der alten Seen angesammelt hatte. Des Weiteren befindet sich diese Bohrstelle in einer geologischen Schicht, die ca. 180 Metern dick ist, die so genannte „Murray-Formation“. Die Ergebnisse zeigen, dass diese Seenumgebung dauerhaft war und nicht flüchtig. Seit der zweijährigen Missionsverlängerung vom 1. Oktober 2016 an fährt Curiosity weiter bergauf auf diesem Kamm von Mount Sharp, der reich ist an Eisenoxid Mineral Hämatit und tonreichem Grundgestein. Dieses Ziel am unteren Mount Sharp, der in etwa die Größe des Mount Rainier hat, ist etwa zweieinhalb Kilometer entfernt und soll nach ca. der Hälfte der zweijährigen Verlängerung erreicht werden. Dort angekommen soll der Rover in den jüngeren Schichten des Mount Sharp Beweise für eine alte, wasserreiche Umgebungen untersuchen, die im völligen Gegensatz zu der heutigen rauen und trockenen Marsoberfläche stehen.[146]

Am 27. Oktober 2016 entdeckten die Wissenschaftler, auf Bildern der MastCam von diesem Tag, einen seltsam aussehenden Brocken. Diese Bilder hat der Rover am unteren Mount Sharp in der "Murray-Formation" aufgenommen. Am 30. Oktober 2016 hat man diesen Brocken, der in etwa die Größe eines Golfballs hat, mit der ChemCam genauer untersucht und festgestellt, dass es sich um einen Eisen-Nickel-Meteoriten handelt. Diese Art von Meteoriten kommen auch auf der Erde sehr häufig vor. Auch auf dem Mars hat man sie schon häufiger gesehen, aber dieser so genannte „Egg-Rock“, ist der Erste, der nun untersucht wurde. Der Meteorit wurde dutzende Male vom Laser der ChemCam beschossen und an neun Stellen konnte man Eisen, Nickel und Phosphor nachweisen. Eisen-Nickel-Meteoriten entstammen wahrscheinlich aus Asteroiden, bei deren Entstehung sich die schweren Elemente Eisen und Nickel im Innern absetzten. Diese Meteoriten liefern Informationen über verschiedene Asteroiden, die sich aufgelöst haben und deren Kerne auf den Mars und die Erde niedergegangen sind, und der Mars hat möglicherweise eine andere Population von Asteroiden abbekommen als die Erde. "Egg-Rock" schlug vor vielen Millionen Jahren auf den Mars ein. Die Wissenschaftler untersuchen außerdem wie sich die Marsoberfläche auf den Meteoriten auswirkt, im Vergleich zu Meteoriten auf der Erde. Der Rover ist weiterhin in gutem Zustand, um seine Untersuchungen fortzusetzen, nachdem er mehr als doppelt so lange gearbeitet hat wie seine ursprünglich geplante Hauptmission von etwa 23 Monaten, obwohl zwei seiner zehn wissenschaftlichen Instrumente kürzlich Anzeichen einer potenziell eingeschränkten Leistungsfähigkeit gezeigt haben. Die neutronenerzeugende Komponente des DAN-Instruments von Curiosity, liefert Daten, die eine reduzierte Spannung anzeigen. Selbst wenn DAN keine Neutronen mehr erzeugen könnte, könnte das Instrument mithilfe seines passiven Modus weiterhin nach Wassermolekülen im Boden suchen. Die Leistung der Windmessfunktion des REMS ändert sich ebenfalls, obwohl dieses Instrument weiterhin täglich Wetterdaten wie Temperaturen, Luftfeuchtigkeit und Druck zurückgibt.[147]

Am 1. Dezember 2016 hat der Rover einen zuvor erteilten Bohrbefehl nicht korrekt ausgeführt. Der Rover entdeckte einen Fehler in einem frühen Schritt, in dem der "Bohrvorschub"-Mechanismus den Bohrer nicht verlängerte, um das Gesteinsziel mit dem Bohrer zu berühren. Dieser 16. Bohrversuch sollte erstmals nur mit der Drehbewegung des Bohrers ausgeführt werden und nicht wie bisher mit schlagendem und gleichzeitig drehendem Bohrer. Zwei der möglichen Ursachen, die untersucht werden, sind, dass sich eine Bremse am Bohrvorschubmechanismus nicht vollständig gelöst hat oder dass ein elektronischer Encoder für den Motor des Mechanismus nicht wie erwartet funktioniert hat. Kurzschlüsse im Schlagmechanismus sind seit dem ersten Auftreten im Februar 2015 mehrmals zeitweise und unvorhersehbar aufgetreten. Seit der Landung im August 2012 hat Curiosity 15,01 km zurückgelegt und mehr als 840 Meter seit dem Verlassen der "Murray-Buttes". Außerdem ist der Rover etwa 165 Höhenmeter gefahren, davon 44 Meter seit den Murray-Buttes im September 2016.[148]

In den letzten Tagen des Jahres 2016 hat der Rover eine Felsplatte mit dem Namen „Old Soaker“ am unteren Mount Sharp untersucht. Diese Felsplatte ist kreuzweise mit flachen Graten schraffiert, die wahrscheinlich als Risse im trocknenden Schlamm entstanden sind. Wenn diese Interpretation Bestand hat, wären dies die ersten Schlammrisse – technisch als Trocknungsrisse bezeichnet –, die von der Curiosity-Mission bestätigt wurden. Sie wären ein Beweis dafür, dass die alte Ära, in der diese Sedimente abgelagert wurden, eine gewisse Trocknung nach feuchteren Bedingungen beinhaltete. Curiosity hat Hinweise auf antike Seen in älteren, tiefer gelegenen Gesteinsschichten und auch in jüngeren Schlammsteinen oberhalb von „Old Soaker“ gefunden. Die gerissene Schicht bildete sich vor mehr als 3 Milliarden Jahren und wurde anschließend von anderen Sedimentschichten begraben, die alle zu geschichtetem Gestein wurden. Später hat die Winderosion die Schichten über „Old Soaker“ abgetragen. Das Material, das die Risse gefüllt hatte, widerstand der Erosion besser als der Tonstein um ihn herum, so dass das Muster aus den Rissen jetzt als erhabener Grat erscheint. Nach der Untersuchung dieser Stelle fuhr der Rover weiter bergauf in Richtung eines zukünftigen Felsbohrstandorts.[149]
2017
Bearbeiten

Im Februar 2017, also Sommer auf dem Mars, hat Curiosity die zweite Kampagne zur Untersuchung aktiver Sanddünen an der Nordwestflanke des Mount Sharp begonnen. Der Rover hat auch Wirbelstürme beobachtet und überprüft wie weit der Wind die Sandkörner an einem einzigen Tag trägt. Zusammen mit dem Mars Reconnaissance Orbiter versucht man herauszufinden, wie ein geschichteter Berg (Mount Sharp) mitten in einem Einschlagkrater (Gale Krater) entstehen kann. Die kombinierten Beobachtungen zeigen, dass sich die Windmuster im Krater heute von denen unterscheiden, als die Winde aus dem Norden das Material abtrugen, das einst den Raum zwischen Mount Sharp und dem Kraterrand füllte. Bereits im Jahr 2000 schlugen Wissenschaftler vor, das der Mount Sharp im Gale Krater ein Überbleibsel von Winderosion ist. In Milliarden Jahren wurden etwa 64.000 Kubikkilometer Material abgetragen. Der Rover untersuchte in diesem Monat bandförmige, lineare Dünen. Die erste Dünenkampagne Ende 2015 und Anfang 2016 untersuchte halbmondförmige Dünen. Bilder, die Curiosity im Abstand von einem Tag aufnahm, zeigten, dass sich Sandkörner etwa 2,5 cm in Windrichtung bewegt haben. Außerdem wurden Wirbelstürme, so genannte „Staubteufel“, beobachtet und fotografiert. Nach Abschluss der geplanten Dünenbeobachtungen wird Curiosity nach Süden und bergauf in Richtung eines Bergrückens fahren, auf dem das Mineral Hämatit aus den Beobachtungen des Mars Reconnaissance Orbiter identifiziert wurde. Das Wissenschaftsteam von Curiosity hat beschlossen, dieses bemerkenswerte Merkmal „Vera Rubin Ridge“ zu nennen, in Erinnerung an Vera Rubin (1928–2016), deren astronomische Beobachtungen Beweise für die Existenz der Dunkle Materie des Universums lieferten.

Am 19. März 2017 wurden bei einer routinemäßigen Bildkontrolle der Aluminiumräder des Rovers, zwei kleine Brüche an den erhabenen Laufflächen am linken Mittelrad festgestellt. Die letzte Kontrolle dieser Art fand am 27. Januar 2017 statt. Bereits im Jahr 2013 wurde ein Programm von Rad-Langlebigkeitstests auf der Erde gestartet, da schon bald nach dem Missionsbeginn Dellen und Löcher in den Rädern auftauchten. Bis zum 20. März ist Curiosity seit der Landung auf dem Mars im August 2012 16 Kilometer gefahren. Die Untersuchung des Übergangs zur Sulfateinheit, dem am weitesten bergauf gelegenen Ziel auf dem Mount Sharp, wird etwa 6 Kilometer oder weniger zusätzliche Fahrten erfordern. In den vergangenen vier Jahren haben die Rover-Fahrplaner verbesserte Methoden zur Kartierung potenziell gefährlicher Geländeflächen eingesetzt, um das Tempo der Schäden durch scharfe, eingebettete Felsen entlang der Route des Rovers zu reduzieren.[150]
Von Anfang Februar bis Anfang April 2017 untersuchte der Rover vier Standorte in der Nähe einer linearen Düne, um sie mit dem zu vergleichen, was er Ende 2015 und Anfang 2016 bei der Untersuchung der halbmondförmigen Dünen fand. Diese Zwei-Phasen-Kampagne ist die erste Nahuntersuchung von aktiven Dünen außerhalb der Erde. Die linearen Dünen liegen bergauf und etwa 1,6 Kilometer südlich von den Halbmond-Dünen. Beide Untersuchungsstandorte sind Teil eines dunklen Sandstreifens namens „Bagnold-Dünen“, der sich über mehrere Kilometer Länge erstreckt. Dieses Dünenfeld säumt die nordwestliche Flanke des Mount Sharp, den Curiosity gerade erklimmt. Phase 1 der Kampagne waren die halbmondförmigen Dünen, Phase 2 die aktuell untersuchten linearen Dünen. Die Untersuchung soll unter anderem die Frage beantworten, wie der Wind in zwei relativ nah beieinanderliegende Dünen, unterschiedliche Muster formt. Phase 1 wurde während einer windarmen Jahreszeit auf dem Mars durchgeführt, die jetzige Phase 2 während der windreichen Jahreszeit. Zur Feststellung der Windstärke und -richtung, nimmt der Rover Bildpaare zu unterschiedlichen Zeiten auf, um anschließend die Bewegung der Sandkörner zu überprüfen. Eine Sandprobe von den linearen Dünen, befindet sich in der Probenvorrichtung am Ende des Armes des Rovers. Ein Teil davon wurde mit dem SAM-Instrument im Inneren des Rovers analysiert. Das Wissenschaftsteam plant, weitere Proben an SAM und an das CheMin des Rovers zu liefern. Ein Faktor bei der Entscheidung, weiter bergauf zu fahren, bevor die Analyse des gesammelten Sandes abgeschlossen ist, ist der Status des Gesteinsbohrers von Curiosity, der seit dem Auftreten eines Problems mit dem Bohrvorschubmechanismus vor fünf Monaten noch nicht auf einem Gestein eingesetzt wurde. Die Ingenieure untersuchen derzeit, wie sich der Einsatz von Vibrationen bei der Probenabgabe auf den Bohrvorschubmechanismus auswirken kann, mit dem der Bohrmeißel vorwärts und rückwärts bewegt wird. Darüber hinaus erschwerten starke Winde an der Stelle der linearen Dünen den Prozess des Eingießens von Proben in die Eingangsöffnungen für die Laborinstrumente.[151]

Am 2. Juni 2017 wurden in der Zeitschrift "Science" Ergebnisse von Curiositys Untersuchungen veröffentlicht. Im Gale Krater war vor 3 Milliarden Jahren ein See vorhanden. Mit Hilfe der schweren Instrumente des Rovers konnte festgestellt werden, dass der See geschichtet war. Geschichtete Wasserkörper weisen starke chemische oder physikalische Unterschiede zwischen tiefem Wasser und flachem Wasser auf. Im Gale See war das seichte Wasser reicher an Oxidationsmitteln als das tiefere Wasser. In ein und demselben See herrschten gleichzeitig unterschiedliche Bedingungen, die für verschiedene Arten von Mikroben günstig waren. Diese Art der Oxidationsschichtung ist ein Merkmal der Seen auf der Erde und wurde nun auch auf dem Mars gefunden. Die Unterschiede in den physikalischen, chemischen und mineralischen Eigenschaften mehrerer Standorte am unteren Mount Sharp stellten das Rover-Team zunächst vor ein Rätsel. Zum BeispieIl zeigten einige Gesteine eine dickere Schichtung mit einem größeren Anteil eines Eisenminerals namens Hämatit, während andere Gesteine sehr feine Schichten und mehr von einem Eisenmineral namens Magnetit aufwiesen. Der Vergleich dieser Eigenschaften ließ auf sehr unterschiedliche Ablagerungsumgebungen schließen. Es wird überlegt, ob diese Unterschiede auf zeitlich schwankende oder von Ort zu Ort unterschiedliche Umweltbedingungen zurückzuführen sind. Mitte 2017 wird sich Curiosity weiterhin auf höhere und jüngere Schichten des Mount Sharp konzentrieren, um zu untersuchen, wie sich die uralte Seeumwelt zu einer trockeneren Umgebung entwickelt hat, die eher dem modernen Mars ähnelt.[152]

Im Jahr 2014 und 2015 hat der Rover am unteren Mount Sharp in einem Gebiet namens "Pahrump Hills" mehrere Bohrungen durchgeführt. In der Zeitschrift Earth and Planetary Science Letters wurden die Ergebnisse präsentiert. Die Mineralien, die in den vier Proben gefunden wurden, die in der Nähe des Fußes von Mount Sharp untersucht wurden, deuten darauf hin, dass im alten Gale-Krater mehrere verschiedene Umgebungen vorhanden waren. Es gibt Hinweise auf Wasser mit unterschiedlichem pH-Wert und unterschiedlich oxidierenden Bedingungen. Die Mineralien zeigen auch, dass es mehrere Quellregionen für die Gesteine in "Pahrump Hills" und "Marias Pass" gab. In den "Confidence Hills"- und "Mojave 2"-Proben fanden die Wissenschaftler Tonminerale, die sich in der Regel in Gegenwart von flüssigem Wasser mit einem nahezu neutralen pH-Wert bilden und daher gute Indikatoren für frühere Umgebungen sein könnten, die das Leben begünstigten. Das andere hier entdeckte Mineral war Jarosit, ein Salz, das sich in sauren Lösungen bildet. Der Fund von Jarosit deutet darauf hin, dass es in dieser Region zu irgendeinem Zeitpunkt saure Flüssigkeiten gab.[153]
Aktueller Status
BearbeitenBis Oktober 2020 hatte der Rover knapp 23,13 km zurückgelegt. Am Ende des Jahres 2021 schaffte er die 26-km-Marke. Die beiden Bilder zeigen die Kilometer und den Standort im Oktober 2020:[154]
- Wegstrecken von Curiosity auf dem Mars
-
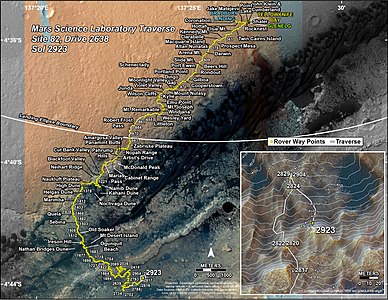 Die Gesamtstrecke bis zum 26. Oktober 2020 (Sol 2923)
Die Gesamtstrecke bis zum 26. Oktober 2020 (Sol 2923) -
 Detailansicht vom 26. Oktober 2020 (Sol 2923)
Detailansicht vom 26. Oktober 2020 (Sol 2923) -
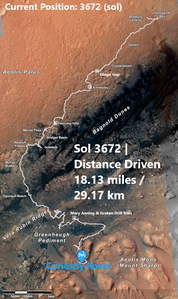 Curiositys Wegstrecke
Curiositys Wegstrecke



Ausgewählte Panoramabilder
Bearbeiten







{kind=link}
Trivia
BearbeitenSend your Name to Mars
BearbeitenUnter dem Stichwort „Send Your Name to Mars“ ermöglichte es die NASA, dass sich interessierte Teilnehmer einschreiben können, damit ihr Name auf einem Mikrochip des Mars Science Laboratory Rover verewigt wird.[155] Bis November 2010 hatten sich weltweit bereits 958.424 Menschen mit ihrem Namen eingetragen[156]. Schließlich wurden 1,2 Millionen Namen gescannt, auf zwei kleine, etwa münzgroße Mikrochips gelasert und an Bord des Rovers eingebaut. Eine ähnliche Aktion unter demselben Namen („Send your Name to Mars“) gab es bereits bei dem Vorgänger Spirit, bei dem etwa vier Millionen Namen von Schülern und Studenten auf eine DVD gebrannt wurden.[157]
Leonardo da Vinci
BearbeitenZusätzlich wurden das Selbstporträt von Leonardo da Vinci und einige seiner Texte und Zeichnungen (zum Beispiel sein Kodex über den Vogelflug) auf mikroskopische Maße verkleinert und ebenfalls an Bord des Rovers untergebracht.[155]
Siehe auch
BearbeitenLiteratur
Bearbeiten- Emily Lakdawalla: The Design and Engineering of Curiosity. Springer Praxis, Cham (Schweiz) 2018, ISBN 978-3-319-68144-3
Weblinks
BearbeitenBilder und Videos
- Jet Propulsion Laboratory: Curiosity Live Cam
- Mars Science Laboratory Curiosity Rover Animation auf YouTube
- Mars Panorama 360° ohne Weißabgleich
- Missionsverlauf mit Bildergalerie auf der Online-Ausgabe der New York Times
- 35C3 - The Mars Rover Curiosity's On-board Computer, deutsche Version des Videos
- Live Status
Einzelnachweise
Bearbeiten- ↑ a b YouTube: Mars Science Laboratory Launch
- ↑ a b Mission Timeline. NASA, 6. August 2012, abgerufen am 7. August 2012.
- ↑ New Frontiers in the Solar System: An Integrated Exploration Strategy. National Academies, S. 84, 194, abgerufen am 31. Juli 2012.
- ↑ a b Mars Science Laboratory. JPL, archiviert vom (nicht mehr online verfügbar) am 31. Dezember 2004; abgerufen am 31. Juli 2012.
- ↑ Landing Sites Debated for Next Mars Rover. Space.com, abgerufen am 31. Juli 2012.
- ↑ MSL Budget Status. (PDF; 92 kB) NASA, abgerufen am 31. Juli 2012.
- ↑ Mars Science Laboratory – Project Status for PSS. (PDF; 92 kB) NASA, abgerufen am 31. Juli 2012.
- ↑ MSL Technical and Replan Status. (PDF; 4,4 MB) NASA/Richard Cook, abgerufen am 31. Juli 2012.
- ↑ NASA: Next NASA Mars Mission Rescheduled For 2011. 4. Dezember 2008, abgerufen am 30. August 2023 (englisch).
- ↑ Dan Leone: Mars Science Lab Needs $44M More To Fly, NASA Audit Finds. Space News, 8. Juni 2011, abgerufen am 30. August 2023 (englisch).
- ↑ NASA Selects Student’s Entry as New Mars Rover Name. JPL, archiviert vom (nicht mehr online verfügbar) am 23. August 2012; abgerufen am 31. Juli 2012.
- ↑ NASA Mars Rover Arrives in Florida After Cross-Country Flight. JPL, archiviert vom (nicht mehr online verfügbar) am 25. August 2012; abgerufen am 31. Juli 2012.
- ↑ NASA’s Next Mars Rover to Land at Gale Crater. JPL, archiviert vom (nicht mehr online verfügbar) am 22. Oktober 2011; abgerufen am 31. Juli 2012.
- ↑ Deutsches Zentrum für Luft- und Raumfahrt (Hrsg.): Landing sites on Mars. 2013, doi:10.5446/12727 (englisch).
- ↑ Mars Science Laboratory: Objectives. JPL, abgerufen am 1. August 2011.
- ↑ Mars Science Laboratory: Overview. JPL, abgerufen am 1. August 2011.
- ↑ a b c d e Spacecraft Summary. JPL, abgerufen am 10. April 2011 (englisch).
- ↑ EMCORE PhotoVoltaics Awarded Mars Cruise Stage Solar Panel Manufacturing Contract from NASA’s Jet Propulsion Laboratory (JPL). EMCORE Corporation, 28. April 2007, ehemals im (nicht mehr online verfügbar); abgerufen am 10. April 2011 (englisch). (Seite nicht mehr abrufbar. Suche in Webarchiven) Info: Der Link wurde automatisch als defekt markiert. Bitte prüfe den Link gemäß Anleitung und entferne dann diesen Hinweis.
- ↑ a b c d e Mars Science Laboratory: Cruise Configuration. JPL, abgerufen am 10. April 2011 (englisch).
- ↑ a b 2011 Thermoelectrics Applications Workshop. (PDF; 3,3 MB) JPL, abgerufen am 10. April 2011.
- ↑ a b c d e f g h i j k l m n o p q r s t u v w x y z aa ab ac ad ae af ag ah ai aj ak Andre Makovsky, Peter Ilott, Jim Taylor: Mars Science Laboratory Telecommunications System Design. (PDF; 5,7 MB) In: Deep Space Communications and Navigation Systems. JPL, November 2009, abgerufen am 9. April 2011 (englisch).
- ↑ a b c d Mars Science Laboratory Aeroshell (MSL). Lockheed Martin, archiviert vom (nicht mehr online verfügbar) am 28. Dezember 2011; abgerufen am 10. April 2011 (englisch).
- ↑ First 360-Degree Panorama From NASA’s Curiosity Mars Rover. JPL, archiviert vom (nicht mehr online verfügbar) am 11. August 2012; abgerufen am 7. August 2012 (englisch).
- ↑ a b Paul B. Brugarolas, A. Miguel San Martin, Edward C. Wong: The RCS attitude controller for the exo-atmospheric and guided entry phases of the Mars Science Laboratory. (PDF; 1,9 MB) California Institute of Technology, 2010, abgerufen am 4. Juni 2011 (englisch).
- ↑ David W. Way, Richard W. Powell, Allen Chen, Adam D. Steltzner, A. Miguel San Martin, P. Daniel Burkhart, Gavin F. Mendeck: Mars Science Laboratory: Entry, Descent, and Landing System Performance. (PDF; 3,3 MB) In: Proceedings of the 2006 IEEE Aerospace Conference, Big Sky, MT, March 3-10, 2006. Abgerufen am 18. August 2012 (englisch).
- ↑ a b Mars Science Laboratory Parachute Qualification Testing. JPL, abgerufen am 7. Mai 2011 (englisch).
- ↑ a b c d e MSL Science Corner: MSL EDL Instrument (MEDLI) Suite. JPL, archiviert vom (nicht mehr online verfügbar) am 16. Juni 2011; abgerufen am 11. Juni 2011 (englisch).
- ↑ NASA: Final Minutes of Curiosity’s Arrival at Mars. Abgerufen am 18. Oktober 2011 (englisch).
- ↑ a b c d e f g h i j Miguel San Marti: The MSL SkyCrane Landing Architecture – A GN&C Perspective. (PDF; 6,4 MB) JPL, Juni 2010, abgerufen am 7. Mai 2011 (englisch).
- ↑ a b Mars Exploration Rover Landings. (PDF; 317 kB) JPL, abgerufen am 30. Juli 2012.
- ↑ a b c Mars Pathfinder/Sojourner. NASA, archiviert vom (nicht mehr online verfügbar) am 25. Februar 2014; abgerufen am 30. Juli 2012.
- ↑ NASA’s 2009 Mars Science Laboratory. (PDF; 2,0 MB) JPL, abgerufen am 5. Juni 2011.
- ↑ Pathfinder Mars Mission – Sojourner mini-rover. (PDF; 2,6 MB) Abgerufen am 5. Juni 2011.
- ↑ Spacecraft: Surface Operations: Rover. JPL, abgerufen am 30. Juli 2012.
- ↑ Introduction to the Mars Microrover. JPL, abgerufen am 30. Juli 2012.
- ↑ Mars Exploration Rover Telecommunications. (PDF; 7,0 MB) JPL, abgerufen am 5. Juni 2011.
- ↑ The Robot Hall of Fame: Mars Pathfinder Sojourner Rover. robothalloffame.org, archiviert vom (nicht mehr online verfügbar) am 7. Oktober 2007; abgerufen am 5. Juni 2011.
- ↑ a b Avionics Innovations for the Mars Exploration Rover Mission: Increasing Brain Power. JPL, archiviert vom (nicht mehr online verfügbar) am 25. Februar 2014; abgerufen am 30. Juli 2012.
- ↑ a b Institut für Planetenforschung Berlin-Adlershof. Archiviert vom (nicht mehr online verfügbar) am 4. März 2016; abgerufen am 27. Juli 2012.
- ↑ a b Mission – Power. NASA/JPL, abgerufen am 15. März 2011.
- ↑ a b Space Radioisotope Power Systems – Multi-Mission Radioisotope Thermoelectric Generator. (PDF) U.S. Department of Energy, archiviert vom (nicht mehr online verfügbar) am 15. Juni 2011; abgerufen am 15. März 2011.
- ↑ a b Energy Department Nuclear Systems Are Powering Mars Rover. U.S. Department of Energy Office of Public Affairs, abgerufen am 6. August 2012.
- ↑ Berechnung aus den 14 Erdjahren der Quelle: Overview of NASA Program on Development of Radioisotope Power Systems with High Specific Power ( vom 9. August 2012 im Internet Archive), abgerufen am 8. August 2012
- ↑ Boeing To Build Space-borne Power Generator. spacedaily.com, abgerufen am 15. März 2011.
- ↑ a b c NASA – Advanced Radioisotope Power Conversion Technology Research and Development, Seite 6, Dezember 2004 (PDF; 600 kB). Zugriff am 6. August 2013
- ↑ Bernd Leitenberger: Die Radioisotopenelemente an Bord von Raumsonden, abgerufen: 8. April 2011
- ↑ a b Mars Science Laboratory – Launch Nuclear Safety. (PDF; 266 kB) NASA, abgerufen am 7. Mai 2011.
- ↑ U.S. space missions using radioisotope power systems. (PDF; 930 kB) American Nuclear Society, April 1999, abgerufen am 30. Juli 2012.
- ↑ Curiosity’s Batteries Get a Charge. JPL, 24. Juli 2012, archiviert vom (nicht mehr online verfügbar) am 29. Juli 2012; abgerufen am 25. Juli 2011.
- ↑ Max Bajracharya, Mark W. Maimone, Daniel Helmick: Autonomy for Mars Rovers: Past, Present, and Future. (PDF; 3,7 MB) Computer, S. 2 (45), abgerufen am 18. April 2011.
- ↑ a b c RAD750 radiation-hardened PowerPC microprocessor. BAE Systems, abgerufen am 16. November 2014.
- ↑ Mars Science Laboratory: Brains. JPL, abgerufen am 18. April 2011.
- ↑ a b Klaus Havelund, Alex Groce, Margaret Smith, Howard Barringer: Monitoring the Execution of Space Craft Flight Software. (PDF; 7,8 MB) JPL, 2009, S. 6, archiviert vom (nicht mehr online verfügbar) am 19. Juli 2011; abgerufen am 18. April 2011.
- ↑ Building Curiosity: Rover Rocks Rocker-Bogie. JPL, abgerufen am 19. April 2011.
- ↑ Frequently Asked Questions. JPL, archiviert vom (nicht mehr online verfügbar) am 16. April 2011; abgerufen am 20. April 2011.
- ↑ New Mars Rover to Feature Morse Code. ARRL, abgerufen am 26. November 2011.
- ↑ Fuk Li: Status of Mars Science Laboratory. (PDF; 2,2 MB) JPL, September 2009, archiviert vom (nicht mehr online verfügbar) am 21. Dezember 2010; abgerufen am 22. April 2011.
- ↑ a b c Mars Science Laboratory: Wheels and Legs. JPL, abgerufen am 20. April 2011.
- ↑ a b NASA’s 2009 Mars Science Laboratory. (PDF; 2,0 MB) JPL, S. 5, abgerufen am 20. April 2011.
- ↑ a b c d Avi B. Okon: Mars Science Laboratory Drill. (PDF; 2,1 MB) In: Proceedings of the 40th Aerospace Mechanisms Symposium, NASA Kennedy Space Center, May 12-14, 2010. Mai 2010, abgerufen am 11. August 2011 (englisch).
- ↑ a b c MSL Science Corner: Sampling System. JPL, archiviert vom (nicht mehr online verfügbar) am 16. September 2011; abgerufen am 14. August 2011.
- ↑ a b c P. G. Conrad, J. E. Eigenbrode, C. T. Mogensen, M. O. Von der Heydt, D. P. Glavin, P. M. Mahaffy and J. A. Johnson: The Mars Science Laboratory Organic Check Material. (PDF; 214 kB) In: 42nd Lunar and Planetary Science Conference (2011). 2011, abgerufen am 14. August 2011 (englisch).
- ↑ a b c d e f g MSL Science Corner: Mast Camera (MastCam). JPL, archiviert vom (nicht mehr online verfügbar) am 8. August 2012; abgerufen am 22. April 2011.
- ↑ a b c d e f g h i MSL Science Corner: Chemistry & Camera (ChemCam). JPL, archiviert vom (nicht mehr online verfügbar) am 20. Juli 2011; abgerufen am 22. April 2011.
- ↑ Javier Gómez-Elvira: Rover Environmental Monitoring Station (REMS). JPL, archiviert vom (nicht mehr online verfügbar) am 20. Juli 2011; abgerufen am 25. August 2016 (englisch).
- ↑ Rover Environmental Monitoring Station for MSL mission. (PDF; 341 kB) In: 4th International workshop on the Mars Atmosphere: modelling and observations. Universität Pierre und Marie Curie, Februar 2011, abgerufen am 11. Juni 2011.
- ↑ a b c d e f g h Chemistry & Mineralogy (CheMin). JPL, archiviert vom (nicht mehr online verfügbar) am 8. August 2012; abgerufen am 13. Mai 2011.
- ↑ a b SPRL’s current projects – Sample Analysis at Mars. SPRL, abgerufen am 4. Juni 2011.
- ↑ a b MSL Science Corner: Sample Analysis at Mars (SAM). JPL, archiviert vom (nicht mehr online verfügbar) am 20. Juli 2011; abgerufen am 4. Juni 2011.
- ↑ a b c d e f g h Paul Mahaffy: The Sample Analysis at Mars Suite and it’s Methane Relevant Investigations. (PDF) NASA Goddard Space Flight Center, November 2009, abgerufen am 4. Juni 2011 (englisch).
- ↑ a b MSL Science Corner: Radiation Assessment Detector (RAD). JPL, archiviert vom (nicht mehr online verfügbar) am 14. September 2011; abgerufen am 5. Juni 2011.
- ↑ The Radiation Assessment Detector (RAD) on the Mars Science Laboratory (MSL). (PDF; 127 kB) In: 40th Lunar and Planetary Science Conference (2009). Lunar and Planetary Institute, abgerufen am 5. Juni 2011.
- ↑ Calibration of the Radiation Assessment Detector (RAD) for MSL. (PDF; 4,5 MB) Southwest Research Institute, abgerufen am 5. Juni 2011.
- ↑ Analysis of the Radiation Hazard Observed by RAD on the Surface of Mars During the September 2017 Solar Particle Event. (PDF; 0,5 MB) 2018, abgerufen am 29. Juli 2019 (englisch).
- ↑ a b c d e MSL Science Corner: Mars Descent Imager (MARDI). JPL, archiviert vom (nicht mehr online verfügbar) am 7. August 2012; abgerufen am 9. Juni 2011 (englisch).
- ↑ a b c d e f Alpha Particle X-ray Spectrometer (APXS). JPL, archiviert vom (nicht mehr online verfügbar) am 20. Juli 2011; abgerufen am 7. Mai 2011.
- ↑ KETEK lands on Mars. KETEK, abgerufen am 4. Mai 2017.
- ↑ a b c d e Mars Hand Lens Imager (MAHLI). JPL, archiviert vom (nicht mehr online verfügbar) am 15. August 2012; abgerufen am 7. Mai 2011.
- ↑ Mars-Bound NASA Rover Carries Coin For Camera Checkup. JPL, archiviert vom (nicht mehr online verfügbar) am 4. März 2012; abgerufen am 10. Februar 2012.
- ↑ a b c d e f Investigation of Dynamic Albedo of Neutrons (DAN) on MSL. (PDF; 689 kB) NASA, abgerufen am 12. August 2012.
- ↑ NASA TV live
- ↑ Mars Science Laboratory Mission Status Report: Course Excellent, Adjustment Postponed. JPL, archiviert vom (nicht mehr online verfügbar) am 6. Dezember 2011; abgerufen am 3. Dezember 2011.
- ↑ Curiosity misst Strahlung im All. Raumfahrer.net, abgerufen am 14. Dezember 2011.
- ↑ NASA Mars-Bound Rover Begins Research In Space. JPL, archiviert vom (nicht mehr online verfügbar) am 22. Januar 2012; abgerufen am 3. Dezember 2011.
- ↑ Radiation Instrument Finishes Inflight Measurements. JPL, archiviert vom (nicht mehr online verfügbar) am 29. Juli 2012; abgerufen am 18. Juli 2011.
- ↑ Newest NASA Mars Mission Connects Past and Future. JPL, archiviert vom (nicht mehr online verfügbar) am 9. August 2012; abgerufen am 8. März 2012.
- ↑ Spacecraft Computer Issue Resolved. JPL, archiviert vom (nicht mehr online verfügbar) am 4. März 2012; abgerufen am 10. Februar 2012.
- ↑ NASA Mars Rover Team Aims For Landing Closer To Prime Science Site. JPL, archiviert vom (nicht mehr online verfügbar) am 13. August 2012; abgerufen am 18. Juli 2012 (englisch).
- ↑ „Opportunity Updates – sols 3023-3029, July 25, 2012 – August 01, 2012: Opportunity Prepares for Curiosity’s Arrival!“ auf nasa.gov ( vom 20. Juni 2014 im Internet Archive) (englisch), abgerufen am 12. August 2012
- ↑ „Opportunity Updates – sols 3036-3042, August 08-14, 2012: Opportunity is on the Move Again!“ auf nasa.gov ( vom 20. Juni 2014 im Internet Archive) (englisch), abgerufen am 20. August 2012
- ↑ Zeitablauf der Landung: Timeline of Major Mission Events During Curiosity’s Landing (NASA 8. Aug 2012) ( vom 11. August 2012 im Internet Archive)
- ↑ Zeroing in on Rover’s Landing Site. JPL, abgerufen am 19. August 2012.
- ↑ Abstand Mars-Erde am 6. August 2012 um 5:31am UTC berechnet von wolframalpha.com: 1,659 AU, abgerufen am 22. August 2012. Die Umrechnung in Lichtminuten ergibt etwa 13,79 bzw. 13:48
- ↑ a b c NASA’s Next Mars Rover to Land at Gale Crater. JPL, archiviert vom (nicht mehr online verfügbar) am 22. Oktober 2011; abgerufen am 22. Juli 2011.
- ↑ NASAtelevision: Challenges of Getting to Mars: Curiosity’s Seven Minutes of Terror (HD)
- ↑ Timeline of Major Mission Events During Curiosity’s Landing. JPL, archiviert vom (nicht mehr online verfügbar) am 11. August 2012; abgerufen am 14. August 2011.
- ↑ How do I land on Mars? JPL, archiviert vom (nicht mehr online verfügbar) am 14. August 2012; abgerufen am 14. August 2011.
- ↑ NASA Curiosity News Briefing Aug. 22 (Video 54 min)
- ↑ NASA Rover Finds Old Streambed On Martian Surface. JPL, archiviert vom (nicht mehr online verfügbar) am 24. Oktober 2012; abgerufen am 12. Januar 2013 (englisch).
- ↑ NASA Rover Finds Clues to Changes in Mars’ Atmosphere. JPL, archiviert vom (nicht mehr online verfügbar) am 12. November 2012; abgerufen am 12. Januar 2013 (englisch).
- ↑ NASA Mars Rover Fully Analyzes First Martian Soil Samples. JPL, archiviert vom (nicht mehr online verfügbar) am 3. Januar 2014; abgerufen am 12. Januar 2013 (englisch).
- ↑ marspages.eu: Solare Konjunktion im April 2013 ( vom 22. März 2019 im Internet Archive), abgerufen am 22. März 2019
- ↑ Ralph-Mirko Richter, raumfahrer.net: Längere Fahrten für den Marsrover Curiosity
- ↑ marspages.eu: Autonomiemodus ( vom 26. April 2019 im Internet Archive), August 2013
- ↑ marspages.eu: Darwin ( vom 26. April 2019 im Internet Archive), September 2013
- ↑ NASA Rover Finds Conditions Once Suited For Ancient Life On Mars. JPL, abgerufen am 13. März 2013 (englisch).
- ↑ Curiosity Mars Rover Sees Trend In Water Presence. JPL, archiviert vom (nicht mehr online verfügbar) am 19. Dezember 2016; abgerufen am 10. Mai 2013 (englisch).
- ↑ Pebbly Rocks Testify to Old Streambed on Mars. JPL, archiviert vom (nicht mehr online verfügbar) am 10. Juli 2013; abgerufen am 17. August 2013 (englisch).
- ↑ Data From NASA Rover's Voyage To Mars Aids Planning. JPL, archiviert vom (nicht mehr online verfügbar) am 8. August 2013; abgerufen am 17. August 2013 (englisch).
- ↑ NASA Rover Gets Movie As A Mars Moon Passes Another. JPL, archiviert vom (nicht mehr online verfügbar) am 24. August 2013; abgerufen am 17. August 2013 (englisch).
- ↑ NASA Curiosity Rover Detects No Methane On Mars. JPL, archiviert vom (nicht mehr online verfügbar) am 30. September 2013; abgerufen am 23. September 2013 (englisch).
- ↑ pro-physik.de: Mars - Das Methan-Rätsel, vom 11. April 2019.
- ↑ marsdaily.com: Mysterious Martian Methane Bursts Confirmed, vom 5. April 2019.
- ↑ sciencemag.org: Mars methane detection and variability at Gale crater, 23. Januar 2015.
- ↑ marsdaily.com: Scientists find likely source of methane on Mars, vom 1. April 2019.
- ↑ a b c NASA Curiosity: First Mars Age Measurement and Human Exploration Help. JPL, archiviert vom (nicht mehr online verfügbar) am 27. Dezember 2013; abgerufen am 25. Dezember 2013 (englisch).
- ↑ First Asteroid Image from the Surface of Mars (Annotated). JPL, 24. April 2014, abgerufen am 6. Mai 2014 (englisch).
- ↑ Target on Mars Looks Good for NASA Rover Drilling. JPL, 30. April 2014, archiviert vom (nicht mehr online verfügbar) am 6. Mai 2014; abgerufen am 6. Mai 2014 (englisch).
- ↑ NASA Mars Rover Curiosity Nears Mountain-Base Outcrop. NASA, 1. August 2014, abgerufen am 5. Januar 2016 (englisch).
- ↑ NASA Rover Drill Pulls First Taste From Mars Mountain. NASA, 25. September 2014, abgerufen am 5. Januar 2016 (englisch).
- ↑ NASA's Curiosity Mars Rover Finds Mineral Match. NASA, 4. November 2014, abgerufen am 5. Januar 2016 (englisch).
- ↑ Second Time Through, Mars Rover Examines Chosen Rocks. NASA, 18. November 2014, abgerufen am 5. Januar 2016 (englisch).
- ↑ NASA's Curiosity Analyzing Sample of Martian Mountain. NASA, 3. Februar 2015, abgerufen am 6. Januar 2016 (englisch).
- ↑ NASA's Curiosity Mars Rover Drills at 'Telegraph Peak'. NASA, 24. Februar 2015, abgerufen am 6. Januar 2016 (englisch).
- ↑ Testing to Diagnose Power Event in Mars Rover. NASA, 3. März 2015, abgerufen am 6. Januar 2016 (englisch).
- ↑ Rover Arm Delivers Rock Powder Sample. NASA, 12. März 2015, abgerufen am 6. Januar 2016 (englisch).
- ↑ NASA's Curiosity Rover Finds Biologically Useful Nitrogen on Mars. NASA, 24. März 2015, abgerufen am 6. Januar 2016 (englisch).
- ↑ Curiosity Sniffs Out History of Martian Atmosphere. NASA, 31. März 2015, abgerufen am 7. Januar 2016 (englisch).
- ↑ NASA's Curiosity Rover Making Tracks and Observations. NASA, 16. April 2015, abgerufen am 7. Januar 2016 (englisch).
- ↑ NASA's Curiosity Rover Adjusts Route Up Martian Mountain. NASA, 22. Mai 2015, abgerufen am 8. Januar 2016 (englisch).
- ↑ Mars Rover's Laser-Zapping Instrument Gets Sharper Vision. NASA, 22. Mai 2015, abgerufen am 8. Januar 2016 (englisch).
- ↑ NASA's Curiosity Mars Rover Studies Rock-Layer Contact Zone. NASA, 1. Juli 2015, abgerufen am 8. Januar 2016 (englisch).
- ↑ NASA's Curiosity Rover Inspects Unusual Bedrock. NASA, 23. Juli 2015, abgerufen am 10. Januar 2016 (englisch).
- ↑ NASA Mars Rover Moves Onward After 'Marias Pass' Studies. NASA, 19. August 2015, abgerufen am 10. Januar 2016 (englisch).
- ↑ Curiosity's Drill Hole and Location are Picture Perfect. NASA, 2. September 2015, abgerufen am 10. Januar 2016 (englisch).
- ↑ NASA's Curiosity Rover Team Confirms Ancient Lakes on Mars. NASA, 3. Oktober 2015, abgerufen am 10. Januar 2016 (englisch).
- ↑ Upgrade Helps NASA Study Mineral Veins on Mars. NASA, 11. November 2015, abgerufen am 10. Januar 2016 (englisch).
- ↑ NASA's Curiosity Mars Rover Heads Toward Active Dunes. NASA, 17. November 2015, abgerufen am 11. Januar 2016 (englisch).
- ↑ Sandy Selfie Sent from NASA Mars Rover. NASA, 29. Januar 2016, abgerufen am 11. Februar 2016 (englisch).
- ↑ Tony Greicius: Curiosity Mars Rover Resumes Full Operations. 5. Juli 2016, abgerufen am 9. Juni 2020.
- ↑ Tony Greicius: NASA Mars Rover Can Choose Laser Targets on Its Own. 20. Juli 2016, abgerufen am 9. Juni 2020.
- ↑ Tony Greicius: Full-Circle Vista from NASA Mars Rover Curiosity Shows 'Murray Buttes'. 17. August 2016, abgerufen am 9. Juni 2020.
- ↑ Tony Greicius: NASA Rover Game Released for Curiosity’s Anniversary. 3. August 2016, abgerufen am 9. Juni 2020.
- ↑ Tony Greicius: Mars Rover Views Spectacular Layered Rock Formations. 9. September 2016, abgerufen am 13. Juni 2020.
- ↑ Tony Greicius: NASA's Curiosity Rover Begins Next Mars Chapter. 3. Oktober 2016, abgerufen am 25. Juli 2020.
- ↑ Martin Perez: Curiosity Mars Rover Checks Odd-looking Iron Meteorite. 2. November 2016, abgerufen am 2. August 2020.
- ↑ Tony Greicius: Curiosity Rover Team Examining New Drill Hiatus. 5. Dezember 2016, abgerufen am 9. August 2020.
- ↑ Martin Perez: Mars Rover Curiosity Examines Possible Mud Cracks. 17. Januar 2017, abgerufen am 28. August 2020.
- ↑ Tony Greicius: Breaks Observed in Rover Wheel Treads. 21. März 2017, abgerufen am 6. September 2020.
- ↑ Tony Greicius: NASA Rover Samples Active Linear Dune on Mars. 4. Mai 2017, abgerufen am 24. September 2020.
- ↑ Martin Perez: Curiosity Peels Back Layers on Ancient Martian Lake. 1. Juni 2017, abgerufen am 1. November 2020.
- ↑ Tony Greicius: NASA Finds Evidence of Diverse Environments in Curiosity Samples. 9. Juni 2017, abgerufen am 22. August 2021.
- ↑ Where is Curiosity? NASA, 11. Januar 2016, abgerufen am 11. Januar 2016 (englisch).
- ↑ a b Send Your Name to Mars ( vom 29. Februar 2016 im Internet Archive)
- ↑ Send Your Name to Mars - World Participation Map ( vom 26. September 2018 im Internet Archive)
- ↑ NASA: PIA05016: Students, Public Connect with Mars. 8. Januar 2004, abgerufen am 4. August 2015 (englisch).