Letzter Kommentar: vor 17 Jahren5 Kommentare2 Personen sind an der Diskussion beteiligt
Die Definition ist mangelhaft, nicht allgemeingültig.
Dem Artikel fehlt die logische Gliederung, die Klassifizierung der Transformationen ist nicht eindeutig. Wo sind die nicht linearen Transformationen. Allgemein x= Ax' ?
Die Beispiele sind eher hilflos gewählt und verwirren nur (Ist doch egal ob der Winkel rechts- oder links-drehend gemessen wird).
Erläuternde Grafiken sind zur Veranschaulichung des Sachverhaltes
--Fantagu23:51, 3. Dez. 2006 (CET)Beantworten
Mit Definitionen bin ich nicht gut, aber ich hoffe, dass meine Grafiken und die zusätzlichen einführenden Texte das Problem etwas anschaulicher machen. --Anitagraser21:08, 9. Mai 2007 (CEST)Beantworten
In deinen Grafiken, Anitagraser, bewegst du den Körper. Damit würden sich die Koordinaten des Körpers im gleichbleibenden System bewegen. Richtig wäre es, das Koordinatensysten (in einer Abbildung die Achsbilder) in ein anderes zu überführen: Anbei eine schnelle Skizze wie die Abbildung zu einer Rotation mit Translation aufgebaut werden sollte:--Fantagu23:26, 9. Mai 2007 (CEST)Beantworten
2007-07-23: habe noch mal reingeschaut und bin mit den Abbildungen noch nicht zufrieden:
Beispiel Translation: In der Abbildung wird ein grünes Koordinatensystem mit einem grünen Quadrat drinnen verschoben. Dadurch wird es mitsamt seines Quadrates rot. Die roten Koordinaten des roten Q. sind exakt gleich den grünen K des grünen Q. wo ist da die Transformation geblieben? Die Transformation hat im Koordinatensystem des Betrachters stattgefunden. Das ist aber nicht dargestellt. Die Bezeichner des Beispiels sind nicht zu finden.
Bei der Abb. zu Drehung muss der die Drehung andeutende Bogen stets ein Kreisbogen sein, sonst wäre es eine affine Abb..
Bei der Skalierung bleiben die Koordinatenachsen i.d.R. gleich lang, da sie den Einheitsvektor repräsentieren.--Fantagu23:08, 23. Jul. 2007 (CEST)Beantworten
Mir scheint auch die Formel für die Berechnung von x' und y' bei der Rotation nicht ganz korrekt zu sein.Meiner Meinung nach muss das Vorzeichen bei den Sinus Parametern jeweils getauscht werden, da es eine Drehung nach links ist.
wäre eine Aufteilung in Systematik und Formelsammlung sinnvoll?? --W!B: 05:35, 20. Okt 2005 (CEST)
Ich hoffe , dass nicht irgendwelche Wiki-puristen die Formeln im Artikel wieder weglöschen.
Es ist ein häufiges Problem und man findet darüber im Netz nicht allzu schnell etwas brauchbares.
==> Bitte stehen lassen !!!
Benutzer:rho
Es wird von Verhältnisformeln geredet, ist das das selbe wie eine Verhältnisgleichung?
Wenn ja kann man den Link ändern.
--217.93.6.174 17:29, 13. Apr 2005 (CEST)
Sollte das Y max neu aus dem Bild in der unteren Grafik nicht ein X max neu sein;
es heißt ja "für die x-Werte gilt entsprechendes" ?
Unter Koordinatentransformation#Lineare Transformationen steht zu recht: "Bei linearen Transformationen sind die neuen Koordinaten lineare Funktionen der ursprünglichen" und dadurch ist der Ausdruck "Die Skalierung ist Spezialfall der linearen Transformation, bei der alle Koordinatenwerte mit dem gleichen Faktor s multipliziert werden. Die Matrix A ist in diesem Fall s mal die Einheitsmatrix." als unsinnig schon widerlegt. "".. Spezialfall der linearen Transformation." ist richtig, der Rest widersinnig. Auf Grund der Darstellung im Inhaltsverzeichnis aber auch überflüssig. --TumtraH-PumA (Diskussion) 17:43, 16. Nov. 2014 (CET)Beantworten
Ich habe mich schon totgegooglet, und auch in der Wikipedia bin ich bisher nicht fündig geworden, um Kugelkoordinaten von einem Koordinatensystem auf ein anderes (gedrehtes) System mit gleichen Zentrum umzuwandeln. :-( --RokerHRO 07:47, 11. Nov 2005 (CET)
Das sollte eigentlich mit der Helmert-Transformation möglich sein. Um welche Koordinatensysteme handelt es sich? -- sk 10:48, 11. Nov 2005 (CET)
Zwei spherische mit gleichem Koordinatenursprung. Nur eben gegeneinander um die Winkel um die X-, Y- und Z-Achse verdreht. Also aus nach . --RokerHRO 17:31, 11. Nov 2005 (CET)
Dann musst du doch blos die Rotationsmatrizen der Reihe nach anwenden (oder zu einer Drehmatrix multiplizieren) oder? --Robert 17:55, 11. Nov 2005 (CET)
Die beziehen sich aber auf kartesische Koordinaten. Ich müsste also erst in kartesische Koordinaten umrechen, dann mit 3 Drehmatritzen multiplizieren und anschließend wieder in Polarkoordinaten zurückwandeln. Ziemlich großer Aufwand, und von Rundungsfehlern rede ich gar nicht erst. :-( --RokerHRO 18:13, 11. Nov 2005 (CET)
Da hast du natürlich recht... --Robert 18:59, 11. Nov 2005 (CET)
Das Problem bei diesen Rotationen ist immer die y-Achse. Aus diesem Grund rotiert man in Kugelkoordinaten auch nicht um x, y und z, sondern benutzt typischer weise Eulerwinkel, also Drehungen um z-y-z oder z-x-z... je nach definition. Ich bevorzuge die y-Variante. Bei den beiden z-Drehungen ergeben nur einen additiven Azimuthalwinkel. Die y-Drehung erforder aber leider inverse Winkelfunktionen, was dann leider auch nicht immer eineindeutig ist.
Dennoch kann man was zu Transformationen in Kugelkoordinaten schreiben. Dazu aber zunächst eine Anmerkung zu den kartesischen Koordinaten. Eine wichtige Anwendung fehlt nämlich, die allgemeine Koordinaten Transformation eines Tensors n-ter Stufe. Das ist in zwar ohne Belang in der Geodesie aber sehr wichtig in Physik und Mathematik. Der Spezialfall für den Vektor wurde ja gegeben.
Man würde allgemein definieren , wobei der j-te (normierte) Basisvektor ist (entsprechend für das gestrichene System). Das sind genaugenommen die Winkelkosinus zwischen neuem und altem Koordinatensystem. Ein transformierter Vektor ist dann einfach . Und allgemein ist . Ich benutze natürlich die Einsteinsche Summenkonvention.
Und das kann man natürlich auch für Kugelkoordinaten machen. Tensoren in Kugelkoordinaten sehen natürlich etwas anders aus. Das Paradebeispiel sind die Kugelflächenfunktionen . Die Ordnung des tensors ist l und er hat (im Prinzip) 2l+1 unabhängige Komponenten...die m's. Die Gewichte der unabhängigen Komponenten änder sich bei Rotation gemäß . Dabei ist D die sog. Wigner-D-Funktion die von den oben erwähnten Eulerwinkeln abhängt.
Dabei kommt mir eine Idee, wie man das oben diskutierte Problem vielleicht zumindest Teilweise lösen kann: Nehem wir einen einfachen Dipol, der hat in Kugelkoordinaten die Form , wobei ist. Ein Dipol entlang z ist einfach (0,1,0). So findet man schnell das man im Dipol und speichern kann, und zwar in der Form . Das transformiert man dann mit der Wigner-D-Funktion. und man hat und . Das sieht, wenn man alles zusammen hinschreibt, zwar nicht schön aus, ist aber "straight forward" und enthält nur eine inverse Winkelfunktion, die aber keine mehrdeutigen Werte annimmt.
Nicht hübsch aber selten. 150.244.118.127 19:42, 1. Dez 2005 (CET) (bin immer noch kein offizieller Wiki-User...naja)
Habs mir noch mal angeguckt...sollte richtig sein...
Aha. Irgendwie hatte ich ja auf Formeln in der Form und gehofft, wo man einfach die Ausgangsdaten reinsteckt und die Koordinaten im Zielsystem herausbekommt. ;-) --RokerHRO 22:17, 1. Dez 2005 (CET)
Naja, genau das ist es doch auch, oder? Ok, die formeln sind recht kompliziert,und es mag sein, daß es bedeutend einfachere gibt (auch wenn ich nicht glaube, daß sie viel einfacher sein werden); das kann ich nicht garantieren.Ziemlich sicher ist jedoch, daß meine Rechnungen richtig sind (immer gefährlich soetwas zu behaupten;)).Ich hab es mehrfach mit der numerischen Methode verglichen. Sicher, die Methode hat Vor- und Nachteile. Das gute ist, daß die Wigner-D-Funktion die y-Rotation übernimmt. Als Nachteil könnte man den Imaginärteil sehen; man könnte sagen, das sei keine angemessene Funktion. Das Problem kann man aber auch lösen, denn schließlich muß das Ergebnis wieder von der Ursprünglichen Form sein . Man kann also die Lösung für nehmen und in der Lösung für entsprechend Teilen, also . Im Zähler vom Logarithmus steht dann natürlich der ganze Kram der schon oben stand. Hier sieht man dann auch um so deutlicher, daß man Probleme bekommt wenn man mit am Nord- oder Südpol landet. Das gibt für eine Division durch Null. Wundert auch nicht wirklich: auf welchem Längengrad liegt denn der Nord-/Südpol? Mit derartigen Problemen war aber auch zu rechnen. Das mit den Mannigfaltigkeiten, Karten und Atlanten ist in Bezug auf die Kugel ja nichts neues. Da spielt uns die Topologie halt einen Streich, Pech. Mikuszefski 15:26, 2. Dez 2005 (CET)
Bei den Polarkoordinaten gibt es natürlich auch das Problem mit der Tangensfunktion und der Eineindeutigkeit Trigonometrischer Funktionen, die ich bereits weiter oben in der Diskussion erwähnt habe. Zum einen bekommt man als Lösung nur Winkel zwischen und (den der kann natürlich nicht entscheiden, ob der Zähler oder der Nenner negativ ist), zum anderen sind alle Werte mit tabu. Auch hier könnte man schreiben, vorausgesetzt man hat keine Angst vor komplexen Zahlen: . Diese Lösung hat dann nur im Koordinatenursprung eine Singularität, und der Ursprung hat ja auch keinen Winkel.
Dann muss man wieder dazuschreiben, was man genau mit ln meint, manche Autoren schließen da die negative reelle Achse aus usw. Es gäbe auch noch den Trick, algebraisch eine Wurzel aus der entsprechenden komplexen Zahl auszurechnen und dann den Arkustangens oder -(ko)sinus zu verdoppeln, habe mir aber nicht überlegt, wie die Formel dann explizit aussieht.--Gunther 18:13, 2. Dez 2005 (CET)
Der Trick ansich gefällt mir gut. Man muß ein wenig aufpassen, wohin die Wurzel denn nun eigentlich dreht; und das ist der der obere Halbraum. Meiner Meinung ist dann der ArcSin angemessen und die Lösung wäre . Unglücklicher weise verbleibt das Problem mit der x-Achse, sprich y=0. Zugegeben, der Logarithmus hat natürlich einen Verzweigungsschnitt, den man üblich auf die negative imaginäre Achse legt. Soweit ich das beurteilen kann, ist die dazu passende Definition für negative reele Zahlen (): . Das Problem wäre also recht schnell gelöst. Trotzdem finde ich das mit der Wurzel gut. Und im Limes sollte die Lösung auch existieren...oder es ist eine hebbare Singularität....oder so. Mikuszefski 20:03, 2. Dez 2005 (CET)
, also vereinfacht sich der Bruch in der o.a. Formel zu
(Habe allerdings nicht überprüft, ob die Ursprungsformel stimmt.)--Gunther 20:20, 2. Dez 2005 (CET)
Das würde sich mit meinem Limes decken, den ich gerade berechnet hab; der ist auch . Auf die Vereinfachung hät ich aber auch selber kommen können :). Das wäre dann wohl eine Lösung. Ob einem eine Lösung mit gefällt, ist ne andere Sache. Was die Richtigkeit der Formeln angeht: Ich hab sie ein paar mal getestet und das Ergebnis war richtig; prüfen schadet aber sicher nie. Mikuszefski 20:31, 2. Dez 2005 (CET)
Signum ist jedenfalls besser als . Wenn man den Bruch noch zu umschreibt, kann man die Halbwinkelformel für den Kosinus erkennen, und wenn Du spezielle Werte überprüft hast, kann man Vorzeichenfehler wohl ausschließen :-) --Gunther 21:05, 2. Dez 2005 (CET)
Sehr hübsch (klar ist Sgn besser als diese Wurzelbehandlung). Das Sgn kann man dann auch noch aus dem arcsin rausziehen, dann sieht es wirlich schick aus. Wir haben also schlußendlich, wenn ich zusammenfassen darf: . Es sei noch angemerkt, daß diese Lösung, im Gegensatz zum arctan und zum ln, keine negativen Winkel liefert sondern . Denn ein Problem ist mir gerade doch noch aufgefallen. Leider kann man mit dieser Definition nicht zwischen positiver und negativer x-Achse unterscheiden. Der Winkel 0 kommt nicht vor, wie ärgerlich. Muß ich noch mal drüber nachdenken. --Mikuszefski 22:00, 2. Dez 2005 (CET)
Ach ja, ich erinnere mich dunkel... Signum ist schon eine blöde Funktion.--Gunther 22:11, 2. Dez 2005 (CET)
Letzter Kommentar: vor 17 Jahren2 Kommentare2 Personen sind an der Diskussion beteiligt
Sagt mal Leute: Gibt es nicht irgendwo ein Programm wo man die Koordinaten eingibt, sagt a) welches Datum das ist b) welches Datum man haben will und dann die richtigen Koordinaten zu b erhält?
In Neu Ulm gibt es ein Kreuz im Boden vom Petrusplatz. Da ist angegeben 10° ösliche Länge v.G. nach (ED50) nach GPS liegt der 10te Grad aber 500 m weiter östlich, wie ärgerlich.Schwedenpeter13:07, 28. Mär. 2007 (CEST)Beantworten
Letzter Kommentar: vor 1 Jahr3 Kommentare3 Personen sind an der Diskussion beteiligt
Oh oh....
Also ich suchte gerade nach Hilfe für eine Rotationsmatrix, um die zu implementieren...
Da ich das aber in Assembler hinbastele, hat mich das "-sin" gestört und ich meinen Kopf
angeworfen, was da denn eigentlich so rauskommt.
Es mag ja manchmal gewollt sein, aber wenn sich mathematisch "irgendwas dreht", dann normalerweise
gegen den Uhrzeigersinn. Vielleicht sollte man da beide Varianten explizit angeben.
Außerdem ist die Grafik daneben verwirrend, weil dort auch gegen den Uhrzeigersinn gedreht wird.
Viele Grüße, Hachti (gerade nicht angemeldet, aber echt)
Sehe ich genauso, habe es als Erklärung gerade hinzugefügt. Die Angegebene Formel dreht im Uhrzeigersinn, die Skizze dreht dagegen, das Minus müsste also für den gezeigten Fall zu dem anderen Sinus kommen.
--Papperlapapp16:29, 24. Mär. 2008 (CET)Beantworten
Um alle Unklarheiten zu beseitigen:
X' = x * Cos(Phi) - y * Sin(Phi)
Y' = x * Sin(Phi) + y * Cos(Phi)
So dreht der Punkt gegen den Uhrzeigersinn, also mathematisch positiv. Die derzeitige Behauptung, dass der Punkt sich bei den momentan angegebenen Formeln gegen den Uhrzeigersinn dreht ist also falsch.
---
Für mich bezieht sich der Drehwinkel eher auf das Koordinatensystem und nicht auf die Punkte, sodass es
x' = x * cos(phi) + y * sin(phi)
y' = x * -sin(phi) + y * cos(phi)
heißen müsste. Siehe auch hier: [1].
Das würde hier auch Sinn machen, weil in der Abbildung das Koordinatensystem gedreht wird und nicht die Punkte.
Mich hat dieses Beispiel hier auch sehr verwirrt. Grundsätlich ist es nicht falsch, man müsste nur in der Grafik die Achsbezeichnungen mal einfügen. Denn je nach Transformationsrichtung steht das Minus einmal oben und einmal unten.
Ansonsten kann ich dazu nur sagen, dass für mich als Maschinenbauer die Umrechnung in die andere Richtung also von x' auf x wesentlich weniger Verwirrung stiften würde. Vielleicht kann ja einfach jemand die Achsbezeichungen einfügen und beide Versionen der Formel (Hin- und Rücktransformation) reinschreiben.
Gruß Manuel (keine Ahnung wie das geht mit dem anmelden geht)
Letzter Kommentar: vor 16 Jahren1 Kommentar1 Person ist an der Diskussion beteiligt
Beim Überfliegen der Diskussion kam mir in den Sinn, darauf hinzuweisen, dass die hier angesprochenen Transformationen im Vermessungswesen / Geodäsie quasi Alltag sind. In entsprechenden Fachbüchern finden sich die Antworten einiger Unklarheiten, die hier diskutiert werden - schön nacheinander mit wachsender Anzahl der Parameter durchexerziert. Der Vorteil dieser Quellen ist die Anschaulichkeit, während der vorliegende Artikel durch den allgemeingültigen Anspruch auch für mathematisch nicht unbegabte ein hartes Brot darstellt. Aber tobt Euch ruhig aus, macht ja auch Spaß, das Rad neu zu erfinden!
Letzter Kommentar: vor 8 Jahren3 Kommentare2 Personen sind an der Diskussion beteiligt
Ich glaube, besonders im Zusammenspiel mit Fließtext, Formeln und Abbildungen vermischt der Artikel 2 Betrachtungen (vereinfachend sind die Vektorraumelemente mal Punkte):
Koordinaten werden transformiert, und damit erhalten alte Koordinaten neue Bedeutungen als andere Punkte,
Koordinaten werden transformiert, und damit erhalten Punkte neue Koordinaten (die Punkte bleiben dabei aber gleich).
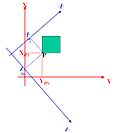
Um die beiden mehr oder weniger (aber auch das nicht so richtig) entgegengesetzten Koordinatentransformationsbegriffe besser auseinanderzuhalten, hilft vielleicht obiges Bild:
Ein Koordinatensystem (dargestellt durch das Gitter) wird gedreht.
Der schwarze Punkt hat die Koordinaten (4,3) und (5,0).
Der rote Punkt, der durch mit-Transformation des schwarzen mit dem Koordinatensystem entsteht, hat die Koordinaten (4,3) und ([irgendwas krummes],[irgendwas anderes krummes]).
Der schwarze Punkt könnte entgegengesetzt rotiert werden und im Ergebnis entstünde ein Punkt, der die Koordinaten (5,0) hätte.
Vielleicht hat ja jemand Lust, das vernünftig in den Text einzubauen und vielleicht noch eine Beschriftung ins Bild einzubauen (Hab' das SVG extra per Hand geschrieben, sodass es für Menschen leicht les- versteh- und änderbar ist. Soll nach Möglichkeit auch so bleiben.)
Bei der Beschriftung ergibt sich das Problem, dass nach dem momentanen Text im Rotationsabschnitt der schwarze Punkt sowohl mit p als auch mit p' bezeichnet werden müsste, was ein wenig seltsam ist. --Daniel5Ko23:20, 1. Nov. 2010 (CET)Beantworten
Ich habe mal im Text das durch ersetzt, damit vielleicht klarer wird, dass das nicht die Bezeichnung des Punkts, sondern seine Koordinaten sind. Ansonsten stimme ich zu, dass eine Überarbeitung der Bilder nötig wäre. Den roten Punkt würde ich ganz weglassen: Es geht nur um einen Punkt, der in zwei verschiedenen Koordinatensystemem verschiedene Koordinaten hat. --Digamma (Diskussion) 11:53, 19. Mai 2016 (CEST)Beantworten
Ich würde das nicht als "Rückweg" bezeichnen, sondern als ein ganz anderes Problem. Der Rückweg wäre für mich: gegeben: Punkte im Koord.System_2; Drehungen, Streckungen usw. Ergebnis: Koordinaten in altem Koord.System_1.
Das beschriebene Problem ist von der Art: x-Wert bekannt, Funktion f bekannt, gesucht: f(x). Der Rückweg wäre für mich: Funktionswert f(x) bekannt, Funktion f bekannt, gesucht: x. Was du beschreibst wäre: x bekannt, y bekannt, gesucht: Funktion f.
Artikel: "Typische Koordinatentransformationen entstehen durch Drehung (Rotation), Skalierung (Veränderung des Maßstabs), Scherung und Verschiebung (Translation) des Koordinatensystems, die auch kombiniert werden können."
Es ist eine Behauptung, dass KoordTransf. "typischerweise durch ... entstehen".
Koordinatentransformationen können auch entstehen, indem ein Ausgangs-Koordinatensystem und Punkte darin gegeben sind, sowie ein Ziel-Koordinatensystem.
Dann ist nichts bekannt über die Abbildungsfunktion, also "die Koordinatentransformation an sich".
Gegeben sei ein Dreieck ABC mit A(0;0;0), B(3;1;2), C(2;1;-2) im Einheits-Koord.-System des R3.
Um die Position von weiteren Punkten bezogen auf das Dreieck angeben zu können (z.B. für den Test, ob ein Punkt im Dreieck liegt), kann man als transformiertes Koord.-System jenes aus den Vektoren AB, AC und dem Normalenvektor n (= Kreuzprodukt <AB,AC>) aufstellen. Gesucht sind die Rechenschritte, um Punkte vom transf.Koord.-System ins Einheitssystem umzusetzen, sowie der umgekehrte Vorgang.
Mit der Matrix (AB AC n) kann man Punkte des transf.Koord.-Systems ins Einheitssystem umrechnen; für den umgekehrten Weg braucht man die inverse Matrix. Zu keinem Zeitpunkt ist dabei notwendig, irgend etwas über Drehungen/Streckungen/... zu wissen. Es ist auch nicht bekannt, mittels welcher Drehung/Streckung/... (in welcher Reihenfolge) man vom Einheitssystem ins transformierte gelangt.
--arilou (Diskussion) 00:35, 16. Sep. 2012 (CEST)Beantworten
OK, jetzt verstehe ich dich. In deinem Beispiel ist tatsächlich bekannt, welche - in diesem Fall lineare - Abbildung das eine Koordinatensystem auf das andere abbildet (nämlich durch die Angabe der Bilder der Einheitsvektoren), nur ist diese Abbildung nicht als Drehung/Streckung/... gegeben. Das könnte man tatsächlich noch ergänzen.
Letzter Kommentar: vor 8 Jahren6 Kommentare3 Personen sind an der Diskussion beteiligt
Warum schlägt jemand in einem Lexikon "Koordinatentransformation" nach?
Wahrscheinlich nicht, weil er ein Studium in dem Fach belegt hat. Er will wissen, wie das geht.
Das trifft natürlich nicht nur auf diese Seite zu: Viele - gerade mathematische - Artikel auf Wikipedia sind für den Laien unverständlich.
Im Endeffekt heißt das, der Artikel ist ausschließlich dafür da, dass sich Gelehrte über die Richtigkeit des Inhalts streiten können. Denn alle Anderen kapieren nicht, was der Verfasser überhaupt von ihnen will.
Wenn ich Bahnhof verstehen will, schlage ich dort nach. Ansonsten benötige ich eine gebrauchsfertige Anleitung. Die nützt dann vielleicht Studierenden nichts. Also kann der ganze Krempel stehen bleiben und eine Anleitung für den Normalbürger soll ans Ende gesetzt werden.
Also bitte: Wenn der Schreiberling (oder die Schreiberlinge) hier einen IQ von 180 haben (gefühlt, gegen meine Doofheit), so sollte es doch hoffentlich ausreichen, das auch zu erklären. Ich wurde jedenfalls mit 0 Wissen geboren und die Zeit reicht einfach nicht, ALLES zu studieren. (nicht signierter Beitrag von77.9.230.184 (Diskussion) 23:11, 18. Nov. 2016 (CET))Beantworten
"Wahrscheinlich nicht, weil er ein Studium in dem Fach belegt hat. Er will wissen, wie das geht."
Vielleicht will er auch eher wissen, was das ist? Für gebrauchsfertige Anleitungen ist ein Lexikon nicht das richtige. Und ehrlich gesagt, ist deine Kritik nicht wirklich hilfreich. Vielleicht könntest du einfach ein bisschen genauer schreiben, was du gesucht und nicht gefunden hast. --Digamma (Diskussion) 11:02, 19. Nov. 2016 (CET)Beantworten
Der Beschwerdeführer will wissen, wie das geht, respektive benötigt eine Gebrauchsanweisung, die ihm als Konsument zusteht. Das scheint mir sein für ihn äußerst selbstverständliches Anliegen zu sein. So selbstverständlich, dass er mit Deinen Aufruf, sich ein bisschen genauer zu äußern, gar nichts anfangen kann. Lernen heißt für Viele genau das: Benutzen von Gebrauchsanleitungen.--mfG AnaLemma12:56, 19. Nov. 2016 (CET)Beantworten
Die Frage ist aber, für welche Art von Koordinatentransformation: Für Drehungen oder Verschiebungen eines kartesischen Koordinatensysystems? Für die Umwandlung von Kugelkoordinaten in kartesische oder umgekehrt? Solche Koordinatentransformationen werden bei den entsprechenden Koordinatensystemen beschrieben. --Digamma (Diskussion) 19:52, 20. Nov. 2016 (CET)Beantworten
Warten wir doch einfach ab, ob sich der Beschwerdeführer noch einmal meldet, ob er überhaupt an einer Diskussion interessiert ist. Ich glaube, dass er das nicht tun wird. Er hat sich beschwert um des Beschweren Willens.--mfG AnaLemma22:15, 20. Nov. 2016 (CET)Beantworten
Nun ja, selbst solches Autoren-Bashing ist für mich gelegentlich ein Anlass einen Artikel zu verbessern. Das könnte hier auch der Fall sein, muss aber aber nicht. --Digamma (Diskussion) 22:30, 20. Nov. 2016 (CET)Beantworten
Für die Darstellung und das Verständnis von Transformationen finde ich sehr wichtig klar zu machen, ob sie aktiv oder passiv gemeint sind: Passiv meint, dass ein und derselbe Sachverhalt mit den Koordinaten von zwei verschiedenen Koordinatensystemen beschrieben wird, aktiv meint, dass das Koordinatensystem dasselbe bleibt, aber der ganze physikalische Vorgang, der beschrieben werden soll, entsprechend versetzt/verdreht/bewegt/gespiegelt etc. abläuft. In den Formeln ändert sich beim Wechsel von aktiver zu passiver Darstellung nur mal ein Vorzeichen und an den endgültigen Schlussfolgerungen gar nichts. Aber im Text sollte einer der Standpunkte konsistent durchgehalten werden. - Frage in die Runde: Sehe nur ich das so? Wenn nicht, müsste man die betreffenden Artikel mal daraufhin durchsehen. --Bleckneuhaus (Diskussion) 13:41, 1. Jul. 2023 (CEST)Beantworten
Den Unterschied passiv/aktiv habe ich noch nie gehört. Und ich habe momentan auch keine Vorstellung, was Du mit aktiv meinst. Hast Du dafür ein Beispiel? --TheRunnerUp19:48, 1. Jul. 2023 (CEST)Beantworten
Bei einer aktiven Drehung oder Verschiebung spricht man zumindest in der Mathematik nicht von einer Koordinatentransformation. Von einer Koordinatentransformation spricht man, wenn sich das Koordinatensystem ändert. Wenn sich die Koordinaten eines Objekts ändern, weil das Objekt sich bewegt, dann sprechen zumindest die Mathematiker nicht von einer Koordinatentransformation. Bei der Galilei-Transformation geht es um einen Wechsel des Bezugssystems. Es ist also offensichtlich, dass hier "passiv" gemeint ist. --Digamma (Diskussion) 21:47, 1. Jul. 2023 (CEST)Beantworten
Ich erkenne jetzt, dass der Artikel tatsächlich nicht konsequent ist. In älterer mathematischer Literatur werden geometrische Abbildungen tatsächlich als "Transformationen" bezeichnet, aber wohl kaum als "Koordinatentransformationen". Solche aktiven Transformationen gehören meiner Meinung nach nicht in diesen Artikel. --Digamma (Diskussion) 21:50, 1. Jul. 2023 (CEST)Beantworten
@Digamma Ich muss wohl ein paar Textstellen zusammensuchen, wo das imho durcheinander geht. Nach meiner Erfahrung passiert das besonders bei Drehungen und deren Zusammensetzungen. Wie machst Du Dir denn klar, dass zwei kleine Drehungen um x- und y-Achse nicht vertauschbar sind, der Kommutator vielmehr eine (kleine)^2 Drehung um die z-Achse ist? Ich kann mir das nur mit "aktiver" Drehung vorstellen. --Bleckneuhaus (Diskussion) 22:45, 1. Jul. 2023 (CEST)Beantworten