Diskussion:Eulersche Winkel
Anmerkung
BearbeitenIm Artikel steht: "Andere Möglichkeiten, die Orientierung zu beschreiben und teils diese Nachteile zu umgehen, sind Rotationsmatrizen, Quaternionen oder die Roll-Pitch-Yaw-Winkel."
Roll-Pitch-Yaw-Winkel IST aber eine Form der Euler-Winkel. Insgesamt gibt es 12 Möglichkeiten, Eulerwinkel anzugeben, das sollte vielleicht im Artikel untergebracht werden.
Im Artikel steht: "Neben der hier gezeigten (ZY'X)-Konvention sind weitere Varianten im Gebrauch, sehr häufig Roll-Pitch-Yaw (XY'Z)." Was also suggeriert, dass die Drehung zunächst um die X-Achse, dann um die gedrehte(!) Y-Achse und dann um die 2x gedrehte Z-Achse erfolgt. Roll-Pitch-Yaw-Konvention ist jedoch, wie auch im verlinkten Artikel http://de.wikipedia.org/wiki/Roll-Nick-Gier-Winkel erläutert, eine Konvention, bei der sich die Drehungen auf eine raumfeste(!) Orthogonalbasis beziehen. Richtig wäre also XYZ. Und damit nicht M^f_g = Rz(Ψ)Ry(Θ)Rx(Φ) sondern M^f_g = Rx(Φ)Ry(Θ)Rz(Ψ) (siehe auch eng. Wiki-Seite) (nicht signierter Beitrag von 129.13.186.1 (Diskussion | Beiträge) 22:41, 21. Sep. 2009 (CEST))
Nachteile
BearbeitenHabe ich erstmal so aus dem anderen Artikel übernommen, Sinn erschließt sich mir nicht ganz. Kann das jemand umformulieren? Traitor 17:24, 27. Jan 2006 (CET)
Ich wollte mal kurz darauf hinweisen, dass da was nicht stimmt: Zitat: "Die ausmultiplizierte Gesamtdrehmatrix wird (egal, nach welcher Konvention sie aufgestellt wurde) für den Fall, dass der zweite Euler-Winkel gleich 0 wird, singulär."
Na fein, dann setzt mal alle Euler-Winkel gleich 0, dann ist auf alle Fälle auch der zweite gleich Null (egal welcher jetzt als der 'zweite' angesehen wird). Dann werden alle Cosinüsse:) 1 und alle Sinüsse 0. Es entsteht die Einheitsmatrix und die ist ganz sicher nicht singulär.
Falsch ist auch meiner Meinung (und Erfahrung) nach der Satz "Eine kleine Drehung (d. h. eine Drehung, bei der die Orientierung sich nur wenig ändert) lässt sich im allgemeinen nicht durch drei kleine Eulersche Winkel beschreiben". Wenn überhaupt, dann müsste es heissen "...lässt sich im allgemeinen nicht eindeutig beschreiben...". War das vielleicht auch ursprünglich so gemeint? (nicht signierter Beitrag von 129.247.247.240 (Diskussion | Beiträge) 11:36, 12. Okt. 2009 (CEST))
Herleitung
BearbeitenAls die Herleitung ist richtig, denn bei der zweiten Drehung geht man ja nicht von ursprüngliche KOOS aus sondern von dem durch die erste Drehung "entstandene" KOOS. Dh. aus sicht des zweiten KOOS ist diese Drehmatix wieder richig, immer aufpassen im welchem KOOS man ist. Im übrigen lässt sich jede "Euler-Drehung" wie z.B. x-y-z mit den Winkeln A,B,C durch eine äquivalente Drehung um die Raumfesten Achsen in umgekehrter Reihenfolge ersetzen, also z-y-x mit den Winkeln C,B,A.
Die Drehmatrix soll doch beschreiben, wie ein beliebiger (im ungedrehten Grundkoordinatensystem gegeben) Vektor verdreht wird, indem man die Drehmatrix von links dranmultipliziert. Das bedeutet, dass in den Spalten der Drehmatrix die neuen Basisvektoren des verdrehten Koordinatensystems stehen. Zum Beispiel bei der Drehung um x um Winkel alpha ergibt sich damit für die neue Y'-Achse der Vektor [0, cos(alpha), sin(alpha)]. Wenn ich jetzt um diese Y'-Achse mit dem Winkel beta drehe und die neue Gesamtdrehmatrix aufstelle, dann beschreiben dort wieder die Spalten die entsprechenden sich durch die beiden hintereinander ausgeführten Drehungen ergebenden Basisvektoren. Das bedeutet aber, dass in der Gesamtdrehmatrix von zwei hintereinanderausgeführten Drehungen in der zweiten Spalte wieder der Vektor [0, cos(alpha), sin(alpha)] stehen muss, weil die Y'-Achse ja gleich der Y' '-Achse sein muss, wenn man um Y' dreht. Das ist aber nicht der Fall, wenn man nur mit den Grund-Drehmatrizen arbeitet, wie im Artikel und hier oben in der Diskussion angegeben. Bitte erst nachrechnen, dann antworten. Die Argumentation "aus Sicht des zweiten KOOS ist diese Drehmatrix richtig" stimmt ja schon, aber dann darf man nicht vergessen, dass zwischen die Drehmatrizen noch eine Basiswechselmatrix gehört, die diese Sicht der Dinge erst herstellt. Wenn man alles so hintereinandermultipliziert, dann sind da keine Basiswechsel dabei, ergo findet alles im ursprünglichen, unverdrehten KOOS statt. Dann darf sich die Drehachse aber in der Gesamtdrehmatrix nicht verändern.
- Wenn man zuerst mit A dreht, dann mit B, dann ist das die Matrix BA. Wenn man zuerst mit A dreht, und dann um das Bild der Drehachse von B unter A, dann ist letztere Abbildung die Drehung .
- (Kleine Motivation dieser Aussage: Liegt auf der Drehachse von B, d.h. , so liegt auf der mit A verdrehten Drehachse, d.h. . Setzt man ein, reduziert sich diese Gleichung zu , was offensichtlich richtig ist, wenn gilt.)
- Wenn man jetzt also zuerst um A und dann um die mit A gedrehte Drehachse von B dreht, dann ist das .
- Die Reihenfolge macht also gerade den Unterschied aus, ob man die Achsen festlässt oder mitdreht. (Bei drei Faktoren ist es genau dasselbe.)--Gunther 10:58, 1. Mär 2006 (CET)







Jetzt habe ich es alles nachvollzogen. Es ist auch klargeworden, dass gerade die basistransformierte Drehmatrix ist. Vielleicht kann man diese Zusammenhänge noch im Artikel zusammenfassen? Wäre sicherlich hilfreich für die weitere Herleitung "anderer" Eulerwinkel-Kombinationen. Wenns keiner machen will, mach ich es auch. (MisterNull)

Geschwindigkeit und Beschleunigung
BearbeitenIch fänd es noch viel interesanter die Winkelgeschwindigkeit und Beschleunigung in Eulerwinkeln auszudrücken
zu mathematischen Eigenschaften
BearbeitenDer Satz "Im Falle einer Singularität ist der Drehvektor der ersten Drehung gleich dem Drehvektor der zweiten Drehung." müsste meiner Ansicht nach "Im Falle einer Singularität ist der Drehvektor der ersten Drehung gleich dem Drehvektor der dritten Drehung." lauten
Weitere Konventionen
BearbeitenDie DIN 70000 legt auch ein Koordinatensystem fest --wickedbitweasel 18:13, 8. Okt. 2008 (CEST)
Bitte nicht mehr die gesichtete Fassung von Tolentino wiederherstellen: Problem erledigt.
BearbeitenUrsprünglich enthielt die ungesichtete Fassung vom 5. Mai, 21 Uhr, einen schweren Parserfehler in der "y-Konvention". Durch systematische Anwendung von "trial and error" ist es mir aber gelungen, das Problem zu beheben. Die neue Konvention, die Winkel , und zu nennen, entspricht vollständig der Zeichnung sowie der Englischen Wikipedia und ist insofern eine echte Verbesserung. - MfG, 87.160.64.2 21:46, 5. Mai 2009 (CEST)



Winkelbezeichnung bei Eulerwinkeln
BearbeitenIch finde die Bezeichnung der Eulerwinkel im Artikel verwirrend. Meines Wissens gibt es keine allgemeine Festlegung für die Bezeichner, die haben sich domänenspezifisch im historischen Kontext herausgebildet. Die hier verwendete Notation aus der Luftfahrt/Flugzeugnavigation ist eine von vielen möglichen, hat aber für den unbelasteten Einsteiger ins Thema deutliche Nachteile, die das Lesen und Anwenden der Euler-Drehmatrix erheblich erschweren.
Die exakte Reihenfolge der Drehungen ist für die richtige Anwendung von Eulerwinkeln essentiell. Welche Drehung um welche Achse und welchen Winkel kommt wann?
Mit , und läßt sich für den allgemeinen Anwender keine intuitive Reihenfolge assoziieren (Frage: ist dies die richtige Reihenfolge der Buchstaben im griechischen Alphabet?). Man muß sich ständig neu die Definition vergegenwärtigen, wenn man die Formeln korrekt anwenden will. Erst recht, wenn nur das Ergebnis aus drei Matrixmultiplikationen dasteht. Das schreit nach Anwendungsfehlern!



Eulerwinkel sind ein universelles mathematisches Konzept, ihre Erklärung und Anwendung sollte in der Wikipedia auf den allgemeinen Anwender zugeschnitten sein und ihm das Verstehen intuitiv leicht machen. Ich schlage daher vor,
- die Winkel für die x- und y-Konvention mit , & für die erste, zweite und dritte Drehung zu bezeichnen. Dies hätte folgende Vorteile:



- + die sprichwörtlich alpha-betische Reihenfolge ist intuitiv jedem verständlich.
- + der Anwender wird in Kombination mit einem schrittweisen Aufbau der Drehmatrix aus den Drehmatrizen der Einzeldrehungen auch daran erinnert, in welcher Reihenfolge die (Links-)Multiplikation zu erfolgen hat
- + es wäre eine direkte Assoziation zu dem beigefügten Bild möglich, das auch in der englischen Wikipedia auftaucht, wo ebenfalls , & verwendet werden (vgl. Euler angles Abschnitt "Euler angles as composition of intrinsic rotations").

- Nur wo domänenspezifische Bezeichner etabliert sind (etwa die Vorgaben aus der Luftfahrtnorm) sollten diese auch in der Wikipedia verwendet werden, also auf unserer Seite im Abschnitt Yaw-Pitch-Rollwinkel.
So wird dem Anwender auch klarer, daß er sich über die Bezeichner mit seinen Partnern verständigen muß, um Mißverständnisse zu vermeiden.
Auf der Eulerwinkelseite von Wolfram Mathematica wird die historische Vielfalt der Bezeichner etwas beleuchtet, die beiden Sets hier sind nicht die einzigen die mal jemand für sinnvoll gehalten hat. --Jbsfsax 14:31, 12. Mai 2009 (CEST)
- Also: ich denke dass im Artikel einheitliche Notationen verwendet werden sollten, mit Erklärung, dass es auch andere Notationen gibt und welche das sind. --P. Birken 16:53, 21. Mai 2009 (CEST)
- Zustimmung: einheitliche Notation ist wichtig, um Leser nicht unnötig zu verwirren. Sie ist aber im Artikel nicht gegeben - das Bild verwendet eine völlig andere Notation, die nicht erklärt wird.
- Einwand: Sie gehen sachlich nicht auf die angesprochenen Punkte ein. Verständlichkeit ist ein wichtiges Wikipedia-Prinzip. Die verwendete Notation , & ist domänenspezifisch (Luftfahrt) und intuitiv deutlich schwerer verständlich & zu merken als , & . --Jbsfsax 16:40, 28. Mai 2009 (CEST)
- Das Bild kann man ja ändern. Mir ist nicht klar, dass die verwendete Notation Domänenspezifisch ist. Wichtig wäre es, den Artikel mal auf eine bessere Grundlage zu stellen, was die Literatur angeht und dann kann man die Frage der Notation anhand dieser Literatur einfach beantworten. --P. Birken 16:08, 30. Mai 2009 (CEST)
- Die Winkelbezeichnungen der deutschen und englischen Artikel scheinen nicht übereinzustimmen. (Wobei es mir auf die Groß- bzw. Kleinschreibung der griechischen Buchstaben jetzt natürlich nicht ankommt.)
deutsch: , ,
englisch: , ,
-- 134.60.79.246 12:59, 30. Apr. 2012 (CEST)
- Die Winkelbezeichnungen der deutschen und englischen Artikel scheinen nicht übereinzustimmen. (Wobei es mir auf die Groß- bzw. Kleinschreibung der griechischen Buchstaben jetzt natürlich nicht ankommt.)
- Das Bild kann man ja ändern. Mir ist nicht klar, dass die verwendete Notation Domänenspezifisch ist. Wichtig wäre es, den Artikel mal auf eine bessere Grundlage zu stellen, was die Literatur angeht und dann kann man die Frage der Notation anhand dieser Literatur einfach beantworten. --P. Birken 16:08, 30. Mai 2009 (CEST)






Drehung um gedrehte Achsen
BearbeitenZuerst wird um einen Winkel Ψ um die z-Achse des globalen Koordinatensystems (Z) gedreht. Es folgt eine Rotation um den Winkel Θ um die neue x-Achse (X') und schließlich um den Winkel Φ um die nach den beiden vorherigen Drehungen erhaltene z-Achse Z''.
Das kann man äquivalent auch durch Drehungen nur um die ursprünglichen Achsen beschreiben, man dreht einfach in umgekehrter Reihenfolge:
Zuerst um den Winkel Φ um die z-Achse, dann um den Winkel Θ um die x-Achse und dann um Ψ wieder um die z-Achse.
Zumindest für mich ist so eine Formulierung verständlicher. -- Digamma 11:14, 1. Jun. 2010 (CEST)
Matrizen
BearbeitenEs wird im Artikel nicht klar, welche Bedeutung die Matrizen haben. Sind das
- Abbildungsmatrizen, d. h. wenn man sie mit einem Spaltenvektor multipliziert, dann erhält man einen Spaltenvektor, der die Koordinaten des gedrehten Vektors (im ursprünglichen, festen Koordinatensystem) enthält, oder sind es
- Koordinatentransformationsmatrizen, d. h., wenn man sie mit einem Spaltenvektor multipliziert, dann erhält man die Koordinaten desselben Vektors im gedrehten Koordinatensystem ?
Ich bin zunächst von 1. ausgegangen, das passt zu den Formeln in den Abschnitten x-Konvention und y-Konvention. Aber bei der Anwendung auf den Gewichtsvektor im Abschnitt Luftfahrtnorm ist offensichtlich 2. gemeint. --Digamma (Diskussion) 16:49, 30. Apr. 2012 (CEST)
Matrizen passen nicht zum Text
BearbeitenIm Text steht, es würde immer um neue (gedrehte) Achsen gedreht werden. Die Matrizen drehen aber immer um die selben (festen) Achsen!
Die Feststellung habe ich so auch gemacht. Wie wird das Problem denn nun gelöst ? Mir selbst fehlen dazu die mathematischen Kenntnisse. Aber so wie die Seite ist, ist sie definitiv falsch. (nicht signierter Beitrag von 84.163.120.104 (Diskussion) 23:44, 6. Nov. 2013 (CET))
Außerdem sind bei den Matrizen zur Luftfahrtnorm die Rotationen (zumindest die Rotation um die Z-Achse) nicht nach der Rechte-Hand-Regel sondern nach der Linke-Hand-Regel. Das ist unüblich und anders als bei den Matrizen der anderen Konventionen, wird aber nicht explizit erwähnt.
So, wie diese Wiki-Seite momentan ist, verwirrt sie viel mehr, als dass sie nützt.
- Zu deinem ersten Punkt: siehe den Abschnitt oben #Drehung um gedrehte Achsen und den Abschnitt #Herleitung. --Digamma (Diskussion) 18:34, 5. Dez. 2012 (CET)
Das stimmt, man kann die Drehung um die neuen Achsen beschreiben, indem man die Reihnfolge umkehrt. Allerdings ist z.B. bei der Matrix für die Luftfahrtnorm Yaw-Pitch-Roll die Reihenfolge nicht umgekehrt (erst um Z, dann um Y, dann um X). Beschreibt das Ganze allerdings das Inverse der Drehung (also keine Drehung sondern einen Koodinatensystemwechsel), dann stimmt es wieder, da das Invertieren die Reihenfolge ja abermals umkehrt (das würde auch die linkshändische Drehung erklären). Allerdings ist im Text von Drehung und Transformation und nicht von Koordinatensystemwechsel die Rede.
Ich sehe gerade, dass du das auch in #Matrizen geschrieben hast. Ich finde, die Wiki-Seite ist zu unpräzise, bei einem Thema, bei dem es so auf Kleinigkeiten und genaue Definition ankommt. Ich habe es jetzt wenigstens verstanden, danke für die Hilfe. (nicht signierter Beitrag von 62.80.21.226 (Diskussion) 10:57, 6. Dez. 2012 (CET))
- Mein Problem ist, dass ich mich zwar auf der mathematischen Seite (d.h. der linearen Algebra) gut auskenne, aber nicht in den Anwendungen, also keine Ahnung davon habe, welche Konventionen wo benutzt werden. Deshalb sehe ich mich nicht imstande, den Artikel zu überarbeiten. Ich kann aber gerne mathematische Unterstützung geben. --Digamma (Diskussion) 20:14, 6. Dez. 2012 (CET)
- Ergänzung: Was die Luftfahrt betrifft, da gibt es noch den Artikel Roll-Nick-Gier-Winkel. Deshalb stellt sich sowieso die Frage, ob hier viel darüber stehen soll. --Digamma (Diskussion) 20:20, 6. Dez. 2012 (CET)
- @Digamma, ich bitte Dich, die Rotationsmartrizen – wie sie jetzt dastehen – zu überprüfen.
- @Dringend: Auf den ersten Blick: Vorher waren die Matrizen richtig (wenn auch mit Bezeichnungen, die nicht zu den Bildern passen), jetzt sind sie falsch. Die Reihenfolge ist falsch. Bitte lies doch mal hier diese Diskussionsseite durch. Außerdem schreibst du bei der x-Konvention (Z,X',Z''), dass um die y-Achse gedreht würde. Das passt offensichtlich weder zur Bezeichnung noch zum Bild. Ich fand auch im Großen und Ganzen den alten Text besser. Der zweite Abschnitt gehört nicht in die Einleitung, sondern in einen Abschnitt "Definition". Ich verstehe nicht, warum du diesen umbenannt hast. Thema des Abschnitts ist ja nicht die Konvention selbst, sondern die (von der Konvention abhängende) Definition der Euler-Winkel. Hast du die für die Luftfahrt zuständige Norm vorliegen? Ich würde mich davor hüten, etwas über die Konvention in der Luftfahr zu schreiben, wenn ich als Nichtexperte weder den Text der Norm noch ein Standardwerk vorliegen habe.
- Ich werde deshalb deine Änderungen zurücksetzen. --Digamma (Diskussion) 16:33, 20. Jan. 2013 (CET)
- Noch etwas zu den Matrizen: Ich möchte auf meinen Beitrag im vorigen Abschnitt verweisen: Was sollen die Matrizen darstellen: Abbildungsmatrizen, in deren Spalten die Koordinaten der neuen Basisvektoren bezgl. der alten Basis stehen? Oder Koordinatentransformationsmatrizen, die angewandt auf die Koordinaten eines Vektors im alten (bzw. raumfesten) System, seine Koordinaten im neuen (fahrzeugfesten) System ergeben? Die eine Matrix ist die Inverse der andern, d.h. erstens dass die Vorzeichen vor den Sinus-Termen umgekehrt sind und zweitens die Reihenfolge der Matrizen auch umgekehrt ist.
- Bevor diese Frage geklärt ist, macht es keine Sinn, etwas an den Matrizen zu überarbeiten. --Digamma (Diskussion) 19:02, 20. Jan. 2013 (CET)
- @Digamma: Aber Du hast mir Fehler vorgeworfen, die nicht diese Entscheidung voraussetzen, denn es ist gesagt, was gedreht wird. Nimm bitte dazu Stellung, nachdem Du Folgendes gelesen hast:
Ich bitte Dich nochmals um Überprüfung. Die x-Konvention hatte nur zwei inzwischen korrigierte Schreibfehler (durch Parsen entstanden). Ansonsten ist sie mit der Wolfram-Darstellung nach Auswechseln der Winkel-Buchstaben identisch. Deshalb hatte ich auch nicht vorwiegend um deren Überprüfung gebeten, sondern um die der y-Konvention, weil dafür bei Wolfram keine Abb. existiert, aus denen die Gl.n (30) und (31) verständlich würden. Den Abschnitt Luftfahrt habe ich nur übersichtlicher dargestellt, die Überprüfung der schon bestehenden Matrizen war in meiner im Plural formulierter Bitte eingeschlossen. Ich habe die in der Disk. verlangte Schreibweise mit α, β und γ in 2 Konventionen gemacht und die Matrizen mit Text und Bild bei der x-Konvention mit Wolfram-Hilfe in Übereinstimmung gebracht. Zudem habe ich eine Menge Formales (lesbarer durch Übersichtlichkeit u.ä.) erledigt. Das war nicht einfach Nichts.
mfG dringend 19:33, 20. Jan. 2013 (CET)- OK, ich schau es mir nochmal an. Aber auch wenn da steht, dass das Koordinatensystem gedreht wird, dann heißt das für mich nicht deutlich, dass die Transformationsmatrix und nicht die Drehmatrix angegeben wird. Zumal man zumindest in der Mechanik mit Euler-Winkeln nicht Koordinatentransformationen beschreibt, sondern Drehungen. Auch in der Luftfahrt ist das für mich nicht eindeutig. Ich will doch die Orientierung des Flugzeugs wissen. Die Anwendung im Artikel, wo die Koordinaten eines festen Vektors bezüglich der fahrzeugfesten Basis berechnet werden, erscheint mir eher seltsam. Ich würde immer die umgekehrte Matrix angeben. Vielleicht genügt es aber auch, wenn man klar sagt, was die Matrix bedeutet. --Digamma (Diskussion) 20:21, 20. Jan. 2013 (CET)
- @Digamma: Aber Du hast mir Fehler vorgeworfen, die nicht diese Entscheidung voraussetzen, denn es ist gesagt, was gedreht wird. Nimm bitte dazu Stellung, nachdem Du Folgendes gelesen hast:
Nachdem eine Woche lang hier nichts passierte: s. meine Aktivität auf der Artikel-Seite.
mfG dringend 23:57, 28. Jan. 2013 (CET)
Zunächst müsste man sich drauf einigen von welchem System aus nach welchem System transformiert wird. Üblich ist die Transformation vom körperfesten ins Weltsystem. Auch sonst sind etliche Fehler drin, z.B. bei der Luftfahrtnorm bzw. DIN 70000, bei der die Reihenfolge Gieren, Nicken, Wanken ist. Da die Gesamtmatrizen aber immer ausmultipliziert wurden, ist es eine Menge Arbeit das alles nachzurechnen.--Wruedt (Diskussion) 08:07, 29. Jan. 2013 (CET)
- Müssen wir das? Transformation und Drehungen sind zunächst einmal sekundär. Grundsätzlich sind die Winkel dafür da, Orientierungen zu beschreiben, weshalb Dein Streichen von “Drehungen” im ersten Satz sinnvoll war (auch im EN nicht explizit enthalten). Transf. (Drehg.) hilft uns, die Lage eines Körperpunkts in einem Koord.system anzugeben und vor allem, sie in einem anderen Syst. zu finden. Die Eulerwinkel helfen, wenn die beiden Koord.Systeme xyz und XYZ gleichen Ursprung haben und durch Drehung auseinander hervorgehen. Die Drehung wird mit Matrizen beschrieben, die die Eulerwinkel enthalten. Diese kann man dann doch anwenden, wie man will. Also, die Matrizen sind tatsächlich arbeitsintensiv und beherrsch(t)en den Artikel. Ich habe anfänglich damit viel Zeit verbracht, vorläufig nicht sehr erkenntnisfördernd, weil eben das Allgemeine nicht behandelt war. Nun bitte ich, meine allgemeine Arbeit zu beurteilen und zu verbessern/erweitern. Vorwiegendes Reden über Rechenfehler bei den Matrizen bringt uns nicht weiter.
mfG dringend 11:04, 29. Jan. 2013 (CET) und mfG dringend 12:29, 31. Jan. 2013 (CET)
- Im Grunde sind wir uns doch einig. Speziell die y-Konvention ist aber "finster". Die Elementardrehmatrizen (1. und letzte) enthalten den sinus auf der Hauptdiagonalen, was nicht sein kann. Die mittlere Matrix beschreibt ein Drehung um die x-Achse und nicht wie getextet um die y-Achse. Spätestens hier muss nachgearbeitet werden.--Wruedt (Diskussion) 12:42, 29. Jan. 2013 (CET)
- Bei der letzten Änderung der y-Konvention müssten mE die Vorzeichen beim Sinus gedreht werden.--Wruedt (Diskussion) 07:50, 31. Jan. 2013 (CET)
- Warum nicht? Warum umgekehrt als bei der „x-Konvention“? Ich bitte Dich, auch einmal mitzurechnen. Leite doch bitte die drei Einzel-Matrizen ab und nenne nicht nur das Dir richtig erscheinende Ergebnis. Führe dann bitte auch gleich die Matrizen-Multiplikation aus. Solltest Du eine seriöse Quelle kennen, die diese Arbeit erledigt hat, um so müheloser für uns beide. Für die „x-Konvention“ habe ich schon viel herumgerechnet (und mich dabei oft verrechnet und mich mit Rechenfehlern in Quellen herumgeschlagen), das sollte genügen! Die „y-Konvention“ hast Du auch in der von Wolfram-Math-World abgeschriebenen Version bemängelt. Ich hatte auch Bauchweh, da ich sie nicht verstand (Zeilen (30) und (31)). Jetzt stehen da hinten und vorn die gleichen Matrizen wie in der „x-Konvention“. Die mittlere Matrix ergab sich durch zyklisches Vertauschen. Die ausmultiplizierte Matrix fehlt vorerst, da ich nicht schon wieder rechnen wollte! Für das Multiplikationsergebnis aus der Zeit vor mir fand ich keine bestätigende Quelle. In der engl. WP (euler angles) lautet es andersund ist auch nicht die Transponierte.
mfG dringend 10:37, 31. Jan. 2013 (CET) und mfG dringend 12:29, 31. Jan. 2013 (CET)
- Warum nicht? Warum umgekehrt als bei der „x-Konvention“? Ich bitte Dich, auch einmal mitzurechnen. Leite doch bitte die drei Einzel-Matrizen ab und nenne nicht nur das Dir richtig erscheinende Ergebnis. Führe dann bitte auch gleich die Matrizen-Multiplikation aus. Solltest Du eine seriöse Quelle kennen, die diese Arbeit erledigt hat, um so müheloser für uns beide. Für die „x-Konvention“ habe ich schon viel herumgerechnet (und mich dabei oft verrechnet und mich mit Rechenfehlern in Quellen herumgeschlagen), das sollte genügen! Die „y-Konvention“ hast Du auch in der von Wolfram-Math-World abgeschriebenen Version bemängelt. Ich hatte auch Bauchweh, da ich sie nicht verstand (Zeilen (30) und (31)). Jetzt stehen da hinten und vorn die gleichen Matrizen wie in der „x-Konvention“. Die mittlere Matrix ergab sich durch zyklisches Vertauschen. Die ausmultiplizierte Matrix fehlt vorerst, da ich nicht schon wieder rechnen wollte! Für das Multiplikationsergebnis aus der Zeit vor mir fand ich keine bestätigende Quelle. In der engl. WP (euler angles) lautet es andersund ist auch nicht die Transponierte.
- Siehe hier (Gl. 2.17). Die Drehung um die y-Achse hat die Sinuse umgedreht, wie man nachrechnen kann. Vorne weg sollte aber nochmal geklärt werden von wo nach wo transformiert wird. Im Automobilbau ist es üblich die Matrix vom körperfesten ins Referenzsystem anzugeben. Dann müssten alle Sinuse im VZ gedreht werden (siehe auch die Quelle). Hab aber leider momentan keine DIN-Norm zur Hand.--Wruedt (Diskussion) 11:24, 31. Jan. 2013 (CET)
- Vorläufig habe ich Richtigstellungen in meinen beiden oberen Edits gemacht.
Mit Nennen und Anschauen von (2.17) in der genannten Quelle ist es noch nicht getan. Die Bearbeitung des Abschnitts mit DIN 9300 ist erst der nächste Schritt.
mfG dringend 12:29, 31. Jan. 2013 (CET)
- Vorläufig habe ich Richtigstellungen in meinen beiden oberen Edits gemacht.
- Siehe hier (Gl. 2.17). Die Drehung um die y-Achse hat die Sinuse umgedreht, wie man nachrechnen kann. Vorne weg sollte aber nochmal geklärt werden von wo nach wo transformiert wird. Im Automobilbau ist es üblich die Matrix vom körperfesten ins Referenzsystem anzugeben. Dann müssten alle Sinuse im VZ gedreht werden (siehe auch die Quelle). Hab aber leider momentan keine DIN-Norm zur Hand.--Wruedt (Diskussion) 11:24, 31. Jan. 2013 (CET)
Phi und Psi
BearbeitenMir scheint, dass in der Matrix für M_{GNR} sämtliche Phi und Psi vertauscht sind. --Suhagja (Diskussion) 06:22, 21. Feb. 2013 (CET)
Ich habe es nicht genau kontrolliert, aber wenn man die ersten drei Matrix Multipliziert kommt nicht die Matrix eine Zeile darunter heraus. (nicht signierter Beitrag von 153.96.19.10 (Diskussion) 19:06, 6. Mär. 2013 (CET))
- Nach meinem Dafürhalten sind alle Matrizen vertauscht. Üblicherweise wird die Matrix vom körperfesten System ins Weltsystem angegeben (siehe Quelle Rill). Hier wird unter Eulerwinkel nur die Drehung um z_K, x_1, z_2 verstanden. Auch müssten sämtliche VZ bei den sin in den Elementardrehmatrizen umgedreht werden.--Wruedt (Diskussion) 13:47, 9. Mär. 2013 (CET)
- Gilt die Abschnittüberschrift inzwischen noch? Und: mit Aussagen auf Grund nicht genauen Kontrollierens und nach Dafürhalten ist nicht weiter zu kommen. Das Lemma ist ohne Fleißarbeit nicht zu bewältigen.
mfG dringend 18:06, 9. Mär. 2013 (CET)
- Gilt die Abschnittüberschrift inzwischen noch? Und: mit Aussagen auf Grund nicht genauen Kontrollierens und nach Dafürhalten ist nicht weiter zu kommen. Das Lemma ist ohne Fleißarbeit nicht zu bewältigen.
- Betreff "mein Dafürhalten": Man kann die Rotationsmatrizen sowohl in der im Artikel angegebenen Form 'R : Weltkoordinaten -> Objektkoordinaten', als auch umgekehrt 'R : Objektkoordinaten -> Weltkoordinaten' aufziehen. Die Formeln unterscheiden sich geringfügig (Vorzeichen, Multiplikationsreihenfolge) und am Ende kommt bei der einen Version die transponierte Matrix der anderen Version heraus. Beide Wege sind in sich konsistent und funktionieren aus algebraischer sicht. Beide Varianten kommen in der Literatur vor. Manche Autoren (vor allem auf "namenlosen" Seiten im Internet) mixen auch beide Varianten, was nicht selten zu Fehlern führt, in der Regel aber zumindest zu Verwirrung. Meines Erachtens setzt sich allerdings die im Artikel nicht gewählte Variante, die Rotationsmatrix in der Form 'R : Objektkoordinaten -> Weltkoordinaten' anzugeben, zunehmend in neuerer Literatur durch, wohl vorallem, da sie die (meines Dafürhaltens) "schönere" geometrische Interpretation zulässt. Vom Aufwand her wollte ich es niemandem zumuten, den Artikel auf die andere Variante umzuschreiben. Wenn sich allerdings jemand findet, der das machen wollte, würde ich ihn auch nicht aufhalten wollen. -- imix 2018-04-17
refs
BearbeitenHab versucht die vielen refs auf Goldstein zusammenzufassen. Man könnte ev die Vorlage Literatur benutzen. Bitte überprüfen, ob die refs noch das richtige Ziel finden.--Wruedt (Diskussion) 19:25, 4. Mär. 2013 (CET)
Überarbeitung
BearbeitenZunächst wäre die Frage zu klären, von wo nach wo die Transformationsmatrix üblicherweise angegeben wird. Ich kenn das so wie in der Quelle Rill (vom körperfesten ins Weltsystem). Dann müsste man rausfinden, ob die Eulerschen Winkel nur die z, x1, z2 Konvention sind, oder alle Kombinationen drunter verstanden werden können. Die Quelle Rill unterscheidet z.B. Kardanwinkel. Erst dann sollte man an das mühevolle umsortieren der Matrizen gehen.--Wruedt (Diskussion) 08:37, 10. Mär. 2013 (CET)
- Zu klären ist keine grundsätzliche Frage zum Lemma. Es ist Jacke wie Hose, welches Ausgangs- und welches Ziel-Koordinatensystem ist. Nur bei den Anwendungen ist darauf zu achten. Und da haben wir die Fahrzeugtechnik, wozu die einschlägige Literatur (nicht Rill) zu bemühen ist. Ich habe leider nichts Eindeutiges gefunden, und die DIN-Normen liegen mir nicht vor. Welche von den 12 Kombinationen üblicherweise grundsätzlich wie bezeichnet werden (2 Gruppen), ist quellen-eindeutig und bereits gesagt.
--mfG dringend 13:23, 10. Mär. 2013 (CET)- Wenn ich die Quelle Goldstein richtig deute, wird dort unter Euler-Winkel ebenfalls (wie Rill) die Drehreihenfolge z, x1, z2 verstanden. Von daher wäre eine Präzisierung angebracht. Dass es auch andere Drehreihenfolgen gibt, kann man später erwähnen. Aber momentan halte ich es für unbequellt sämtliche möglichen Kombinationen als Eulerwinkel zu bezeichen.--Wruedt (Diskussion) 15:49, 10. Mär. 2013 (CET)
- Oder anders ausgedrückt. Die 12 Kombinationen sind Goldstein S. 164 entnommen. Letzen Endes gibt es für den Artikel im wesentlichen die eine Quelle Goldstein.--Wruedt (Diskussion) 16:02, 10. Mär. 2013 (CET)
- Die Drehreihenfolge z, x1, z2 für Euler-Winkel wird auch in folgender Quelle angegeben: "Höhere Mathematik" von Meyberg und Vachenauer (Springer, 5. Auflage 1999, S. 321). Georg Stillfried (Diskussion) 09:49, 19. Apr. 2013 (CEST)
Bild bei z, y', x'' stimmt imo nicht. Der Nickwinkel ist mit falschem VZ eingetragen.--Wruedt (Diskussion) 13:17, 13. Mär. 2013 (CET)
Verlinkung Cardan-Winkel
BearbeitenDie Drehung mit der Reihenfolge z,y1,x2 wird auch als Cardan-Winkel bezeichnet (Meyberg und Vachenauer, Höhere Mathematik 1, Springer, 5. Auflage 1999, S. 318). Wenn niemand widerspricht, würde ich einen entsprechenden Hinweis im Abschnitt „z, y', x''-Konvention“ in der Fahrzeugtechnik anbringen und die Lemmata Cardan-Winkel, Kardanwinkel und kardanische Winkel als Links auf diesen Abschnitt erstellen. --Georg Stillfried (Diskussion) 09:58, 19. Apr. 2013 (CEST)
- Nach Quelle Rill sind die Kardan-Winkel definiert als Drehungen um x0, y1, z2.--Wruedt (Diskussion) 18:46, 6. Mai 2013 (CEST)
- Danke für den Hinweis. Es wäre interessant, ob sich die Quellen widersprechen, oder es um ein Missverständis "raumfeste vs. mitgedrehte Drehachsen" geht. Hier die entsprechende Passage aus Meyberg: meyberg.png. Georg Stillfried (Diskussion) 10:39, 7. Mai 2013 (CEST)
- Rill und Meyberg verwenden die gleiche Definition für die Kardanwinkel. Bei Meyberg ev "schlampig" mit x,y,z bezeichnet. Die aufeinanderfolgenden Drehungen erfolgen immer um Zwischenachsen. Die Elementardrehmatrizen sind eindeutig.--Wruedt (Diskussion) 21:41, 7. Mai 2013 (CEST)
- Danke für den Hinweis. Es wäre interessant, ob sich die Quellen widersprechen, oder es um ein Missverständis "raumfeste vs. mitgedrehte Drehachsen" geht. Hier die entsprechende Passage aus Meyberg: meyberg.png. Georg Stillfried (Diskussion) 10:39, 7. Mai 2013 (CEST)
Reihenfolge der Winkel
BearbeitenDen vorigen Beiträgen nach scheint es da ja bereits einiges an Verwirrung gegeben zu haben. Tatsache ist aber, dass die Reihenfolge der ausgeführten Elementardrehungen in der jetzigen Version gerade falsch herum beschrieben ist - im Abschnitt Drehmatrizen der Standard-Kombination wird mit den jetzigen Matrizen erst um , dann um die neue x-Achse x' um den Winkel und erst als letztes um die neue z-Achse z'' um den Winkel gedreht.
Einfachste Korrektur ist es, in der einleitenden Beschreibung und zu vertauschen; das mache ich jetzt. Markus Pössel (Diskussion) 22:38, 3. Jan. 2014 (CET)
Bezug zu Eulers persönliche Leistung fehlt
BearbeitenDie Großschreibung des Begriff (alte Dudenregel vor 1996) zeigt an, dass der Begriff auf eine persönliche Leistung Eulers zurückgeht. Dieser Punkt fehlt im Artikel. --Cepheiden (Diskussion) 18:41, 13. Feb. 2014 (CET)
Möglicher Fehler im Abschnitt x-Konvention
BearbeitenIm Abschnitt -Konvention findet sich folgender Satz: "Zuerst wird mit dem Winkel um die -Achse des Koordinatensystems in Ausgangslage gedreht (Kurzzeichen z)."

In der darunterliegenden Matrizenmultiplikation findet sich allerdings folgender Ausdruck: " " Diese Matrizenmultiplikation entspricht aber einer Anwendung in der Reihenfolge .


Das ist ein Widerspruch. (nicht signierter Beitrag von RichardReloaded (Diskussion | Beiträge) 09:14, 16. Apr. 2014 (CEST))
- Ich denke, dass die Reihenfolge der Drehungen im Text falsch beschrieben wird. Wie auch das Bild daneben zeigt: Zuerst wird um gedreht, dann um , zuletzt um . Ich werde es ändern. --Digamma (Diskussion) 13:20, 16. Apr. 2014 (CEST)
Vorzeichenfehler in Elementarrotationsmatrizen
BearbeitenDie Einträge in den Rotationsmatrizen um eine Koordinatenachse sind falsch (Abschnitt Drehmatrizen der Standard-Kombinationen und folgender). Bei den Sinus Einträgen muss das Vorzeichen getauscht werden, beispielsweise wird aus
R(phi,e_z) = [ cos(phi),sin(phi), 0;
-sin(phi),cos(phi), 0;
0, 0, 1]
folgende korrekte Matrix:
R(phi,e_z) = [ cos(phi),-sin(phi), 0;
sin(phi), cos(phi), 0;
0, 0, 1]
Dies gilt für alle Elementardrehungen. Ob die resultierenden Produkte falsch sind, habe ich nicht überprüft. (nicht signierter Beitrag von Guenther s (Diskussion | Beiträge) 16:11, 3. Jul 2014 (CEST))
Ja, zumindest die zxz-Rotation ist falsch, ich habe eine Quelle gefunden, die das untermauert (http://www.itm.uni-stuttgart.de/courses/madyn/Merkblaetter/M08.pdf). Außerdem habe ich es ausprobiert und Fehler festgestellt (bei einer Rotation sollte die Länge des Vektors erhalten bleiben, das ist hier nicht der Fall)! (nicht signierter Beitrag von 5.61.180.228 (Diskussion) 12:50, 14. Okt. 2015 (CEST))
Eulerwinkel = Apsis in der Mechanik?
BearbeitenIm Artikel Apsis wird mit diesen Worten auf diesen Artikel hier verwiesen. Wenn da was dran ist, sollte das Wort Apsis hier auch hier im Text eingebaut werden. --Zopp (Diskussion) 16:00, 11. Aug. 2014 (CEST)
Möglicher Fehler in Bildern, die z,y',x''-Drehung beschreiben
BearbeitenBitte prüfen, ob die y'- Drehung richtig dargestellt wurde. In den Bildern wird x' richtung z' gedreht, die Drehmatrix schreibt aber die entgegengesetzte Drehrichtung vor. Also z' richtung x' drehen. (nicht signierter Beitrag von 153.96.53.5 (Diskussion) 14:21, 31. Mär. 2015 (CEST))
Reihenfolge der Drehwinkel
BearbeitenAnscheinend gibt es hier massive Verwirrung über die Reihenfolge der Winkel im Abschnitt "Drehfolge-Kombination" und es wird wiederholt ins Falsche "korrigiert". Dabei beschreibt der Abschnitt "Matrix-Herleitung im allgemeinen Fall" genau wie es geht. Also dann, hier die explizite Herleitung für die "x-Konvention":
Zunächst sollte man sich einigen, von welcher Seite her Matrizen, aufgefasst als lineare Abbildungen, operieren: Es gibt hier verschiedene Konvention. Die geläufigste ist meiner Meinung nach, dass Matrizen von links wirken, und dies sollte man annehmen, wenn nichts weiter gesagt wird. Seien dann die Drehmatrizen um die Achsen mit Winkel . Dann ist also das Produkt erst Drehung um mit dann um mit und dann um mit .



Als nächstes schauen wir uns zuerst die Drehung an. Diese dreht die -Achse auf eine neue Achse . Drehung um mit Winkel wird beschrieben durch die Matrix . Will man also erst um mit und dann um mit drehen, so braucht man die Matrix . Letztere dreht die -Achse auf die neue Achse . Drehung um diese Achse mit Winkel wird beschrieben durch die Matrix . Schließlich ergibt sich die gewünschte Drehung zu . (nicht signierter Beitrag von 132.199.96.89 (Diskussion) 12:36, 24. Aug. 2015 (CEST))







- Die Verwirrung in dem Artikel geht schon damit los, dass üblicherweise M vom körperfesten ins Inertialsystem transformiert und nicht umgekehrt.--Wruedt (Diskussion) 18:57, 25. Aug. 2015 (CEST)
- Oops, das hier habe ich erst nach meinem Teilrevert auf der Beo gesehen. Ich hoffe, ich habs nicht verschlimmert. Ich werd's mir noch mal in Ruhe anschauen.--Alturand (Diskussion) 22:54, 28. Mär. 2017 (CEST)
Bild
Bearbeitendie Beschriftung um seine Körperachsen ist irreführend, weil die Rotation z-y-z ausgeführt wird und nicht wie man erwarten würde x-y-z. Ra-raisch (Diskussion) 17:20, 17. Jun. 2016 (CEST)
Intervalle eindeutiger Rotationen
BearbeitenDie Winkel-Intervalle, mit welchen Orientierungsänderungen erfasst werden können, fehlen komplett. Aus der englischen Version des Artikels: der erste und dritte Winkel haben die Intervalgröße 2 Pi, der zweite Winkel hat die Intervalgröße Pi. Diese wichtige Information gehört in den Artikel. Rappel1 (Diskussion)
- Wie meinst Du, sollte man das einbauen. Mach doch mal einen Vorschlag?--Alturand (Diskussion) 17:37, 26. Apr. 2017 (CEST)
- Wie ich sehe ist der Einwand veraltet. Kann dieser Diskussionsbeitrag gelöscht werden? Rappel1 (Diskussion)
Standaard x-Konvention
BearbeitenDie standaard x-Konvention verläuft wie folgt:
- Drehung um z-Achse mit dem Winkel α
- Drehung um x' mit dem Winkel β
- Drehung um z" (= Z) mit dem Winkel γ
Die Drehungen finden also nicht nur statt um Achsen in eins der beide Systemen. Die dargestellte Drehungen über die Euler Winkeln resultieren also nicht im Produkt der Matrizen. Z.B. ist

und ist

Madyno (Diskussion) 15:17, 14. Aug. 2018 (CEST)
- Es gibt doch eine gleichwertige Definition mit drei Drehungen um feste Koordinatenachsen (und in umgekehrter Richtung) - oder liege ich da falsch? Dafür müsste die Matrixmultiplikation dann gelten. --Bleckneuhaus (Diskussion) 16:07, 14. Aug. 2018 (CEST)
Es gibt tatsächlich eine gleichwertige Definition mit Drehungen um die feste Achsen z, x und z, und Winkeln in umgekehrte Richtung, aber wie es jetzt im Artikel steht ist es falsch. Madyno (Diskussion) 22:10, 14. Aug. 2018 (CEST)
Der im Artikel genannte Vorgang ist gleichwertig mit dem Vorgang . Und der letzte Vorgang lässt sich beschreiben mit der erwähnten Drehungsmatrizen, aber in genau der umgekehrte Folge. Madyno (Diskussion) 09:59, 15. Aug. 2018 (CEST)


- Die Darstellung ist korrekt, siehe auch Mathworld, wo das ebenso dargestellt wird (bis auf anderes Vorzeichen bei den Winkeln).--Claude J (Diskussion) 10:44, 15. Aug. 2018 (CEST)
Oben kann man doch sehen das die Vorstellung falsch ist! Leider ist Mathworld zwar korrekt, aber wie gesagt mit anderen Vorzeichen bei den Winkeln. Das bedeutet das Mathworld die Matrizen vorstellt im Achsensystem verbunden mit dem zu drehen Objekt. Leider erklärt Mathworld das nicht gans deutlich. Kann man doch selber alles nachprüfen. Oder vergleiche es mit dem Englischen Wikipedia. Madyno (Diskussion) 11:00, 16. Aug. 2018 (CEST)
Der Beweis findet man in der Niederländische Wikipedia ne:Hoeken van Euler.
@Bleckneuhaus: Statt einfach zu revertieren hättest du meine Korrektion auch verbessern können. Madyno (Diskussion) 13:29, 15. Aug. 2018 (CEST)
Die einzelnen Drehmatrizen sind Standardmatrizen für Drehungen um eine z, x, und nochmal z Achse, aber natürlich nicht raumfeste Achsen sondern im jeweils gedrehten System, wie es da auch steht. Wo liegt das Problem ? Die Gesamtmatrix ist das Matrix-Produkt der Einzelmatrizen.--Claude J (Diskussion) 13:47, 15. Aug. 2018 (CEST)
- @Madyno: Ich wusste nicht genau, was Du mit "Die Drehungen finden aber nicht alle statt in eine der beide Achsensysteme. " exakt meinst. Schließlich gibt es nach jeder Teildrehung ein neues Achsensystem, also insgesamt mehr als 2. Ich würde vorschlagen, Du stellst den ganzen Absatz, den Du geändert haben willst, hier in Deiner Formulierung einmal vor. --Bleckneuhaus (Diskussion) 14:21, 15. Aug. 2018 (CEST)
Die Erwähnte Drehungen in der x-Konvention Finden immer in einem anderen Achsensystem statt. Deshalb kann man Sie nicht einfach mittels die standard Drehungen beschreiben. Die standard Drehungen beziehen sich immer, falls man Sie zusammen benutzt, auf ein und dasselbe Achsensystem. Gleichwertig ist die z-x-z-Konvention, aber zuerst mit gamma, dann beta und zum Schluss mit alpha. Weil die drei Drehungen alle in einem Achsensystem stattfinden, kann man die standard Drehungen benutzen. Madyno (Diskussion) 16:11, 15. Aug. 2018 (CEST)
Die Matrize der Gesamtdrehung kann ausgedruckt werden in der Matrizen der standard Drehungen:
![{\displaystyle [T]=[C][B][A]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5d37c76faec18e5be77330f0cafcfabbbf8c8cdf)
- , und ,



bzw um der z-Achse, der x-Achse und der z-Achse.
Es gillt
- ,
![{\displaystyle [A]=M_{\alpha }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/7073f847fe5bb4532dca39cb6dfbcc28d9f6a46d)
![{\displaystyle [B]=[A]M_{\beta }[A]^{*}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/020220218057709b3a885705af923eb9e7e3bb31)
d.h. zuerst zurückdrehen mit , dann die standard Drehung anwenden und schliesslich wieder mit drehen.
Analog gibt es:
![{\displaystyle [C]=[B][A]M_{\gamma }[A]^{*}[B]^{*}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/03caf1258f5b1de514caa15b6c7c0ffdbabd8fe4)
Daraus ergibt sich:
![{\displaystyle [T]=[C][B][A]=[B][A]M_{\gamma }[A]^{*}[B]^{*}[B][A]^{*}=[A]M_{\beta }[A]^{*}[A]M_{\gamma }=M_{\alpha }M_{\beta }M_{\gamma }}](https://wikimedia.org/api/rest_v1/media/math/render/svg/85ee427d710de1ff811a8e77406e75dcb69f0d9e)
Wie man sieht ist die Folge gleichwertig mit der Folge .
Madyno (Diskussion) 00:17, 16. Aug. 2018 (CEST)
Siehe auch mal den Abschnitt "Matrix-Herleitung im allgemeinen Fall". Madyno (Diskussion) 00:21, 16. Aug. 2018 (CEST)
- Also nochmal: " Ich würde vorschlagen, Du stellst den ganzen Absatz, den Du geändert haben willst, hier in Deiner Formulierung einmal vor." Es ist mir nämich nicht ganz klar, was Du eigentlich ändern willst. Aber erklär es bitte nicht zum (n+1). Mal, sondern schreibe hier einen ausformulierten Textvorschlag - das wäre mein Vorschlag, wie wir da weiter kommen. --Bleckneuhaus (Diskussion) 10:44, 16. Aug. 2018 (CEST)
Alles klar, aber ich hoffe du verstehst etwas von der Sache.
Vorschlag für das erste Teil:
Standard-x-Konvention (z, x′, z″)
BearbeitenZuerst wird mit der Drehung mit dem Winkel um die -Achse des Koordinatensystems in Ausgangslage gedreht (Kurzzeichen z). Es folgt eine Drehung mit dem Winkel um die -Achse in deren Lage nach der ersten Drehung (Kurzzeichen x′) und schließlich eine Drehung mit dem Winkel um die -Achse in deren Lage nach den beiden vorherigen Drehungen (Kurzzeichen z″). (ref: Georg Rill, Thomas Schaeffer: Grundlagen und Methodik der Mehrkörpersimulation. (Leseprobe, PDF; 397 kB) SS 2010, S. 8 /ref) Insgesamt: .




Dies nennt man die intrinsische Konvention.
Die Drehungen finden also statt um Achsen die verbunden snd mit dem Objekt das gedreht wird. Deshalb kann man nicht einfach die standard Drehungsmatrizen
- , und



benutzen.
Es ist aber leicht zu verstehen dass dieser Vorgang gleichwertig ist mit die extrinsische Konvention zxz, die besteht aus eine Drehung um der z-Achse mit dem Winkel , dann eine Drehung um der x-Achse mit dem Winkel , und zum schluss eine Drehung um der z-achse mit dem Winkel . Die Drehungen finden alle statt im festen xyz-System, also ist:

und folglich

Madyno (Diskussion) 17:24, 16. Aug. 2018 (CEST)
Wenn du alpha und gamma vertauschst erhälts du völlig andere Matrizen als in der englischen Wikipedia (Fall Z1 X2 Z3), bei Mathworld oder Goldstein- Auflage 1985- (die stimmen alle mit dem überein was hier im Artikel steht, und der Unterschied bei mathworld ist nur dass das Vorzeichen der Winkel anders gewählt wurde, also der Richtungssinn). Deine Matrix geht auch nicht einfach durch Transponierung aus der im Artikel hervor, man muss zusätzich die Vorzeichen der Winkel ändern. Also wird das bei dir eine andere Interpretation als aktive/passive Drehung inklusive Änderung Richtungssinn der Winkel sein. Die angegebenen Euler-Winkel sind in jedem Fall "intrinsisch" definiert.--Claude J (Diskussion) 14:10, 16. Aug. 2018 (CEST)
- Tsja, warum sollte ich alpha und gamma vertauschsen? Ich könnte auch die Achsen vertauschen, usw. Bestimmt gibt es dann andere Ergebnisse. Warum Mathworld die Vorzeichen der Winkel anders wählt ist mir ein Rätsel, aber es führt zu andere Ergebnisse. Kannst du überhaupt nachvolziehen was ich oben gerschrieben habe? Madyno (Diskussion) 15:01, 16. Aug. 2018 (CEST)
- Hast du verstanden was ich geschrieben habe ? Schau dir mal in Ruhe deine Matrizenmultiplikation im letzten Abschnitt an, vertauscht man gamma gegen alpha entspricht das der Matrix im Artikel oder bei Mathworld (das ist nicht einfach nur ein Vorzeichenwechsel). Wir sollten die Standarddefinition in der Literatur nehmen, da sich die von dir gewählte offensichtlich nur durch die Interpretation der Drehungen unterscheidet (einmal aktiv, einmal passiv, wobei der Übergang dadurch erfolgt dass man die Transponierte Matrix nimmt plus Vorzeichenwechsel).--Claude J (Diskussion) 15:06, 16. Aug. 2018 (CEST)
- Allgemeine Bemerkung: Die Reihenfolge und die Richtungen der Drehungen stehen hier seit Jahren in der Diskussion und werden gefühlt alle paar Monate geändert. Ich wäre erstaunt, wenn hier irgendwann mal der ganze Artikel konsistent wäre. Ich weiß, ich sollte mich an die eigene Nase fassen und könnte mich selber drum kümmern, aber irgendwann habe ich die Hoffnung aufgegeben und den Überblick verloren. Das Problem ist, dass die Abbildungen und der Text und die Formeln und die Literaturbelege alle übereinstimmen sollten. Ich weiß nicht, wie das (auf Dauer) zu schaffen wäre. -- HilberTraum (d, m) 15:45, 16. Aug. 2018 (CEST)
Problem ist das die Reihenfolge: um z mit a, dann um x' mit b, und letztlich um z" mit c, der gleiche räumliche Drehung ist als die Reihenfolge: um z mit c, dann um x mit b, und zum schluss um z mit a. Wie man sieht um augenscheinlich vergleichbare (derselbe) Achsen, und in der umgekehrte Reihenfolge der Winkeln. Ich habe oben gezeigt wieso das so ist. Dann ist es auch irreführend das der inverse Matrix einer Drehung der "gleiche" Drehung ist mit Vorzeichenwechsel. Madyno (Diskussion) 16:21, 16. Aug. 2018 (CEST)
- Das habe ich gar nicht behauptet, irgendwie scheint es hier Verständnisprobleme zu geben. Die inverse Matrix ist die Transponierte bei Drehmatrizen, nur bei deiner Matrix kommt noch ein Vorzeichenwechsel der Drehwinkel hinzu damit sich die Transponierte der Matrix im Artikel ergibt (entweder eine andere Konvention oder du hast was übersehen).--Claude J (Diskussion) 16:39, 16. Aug. 2018 (CEST)
- Ich glaube nicht ich habe etwas übersehen. Die Berechnungen bei Mathworld stimmen zwar, aber die aufgeführte Matrizen gehen nicht mit dem Text einher. Genau betrachtet berechnet Mathworld der transponierte der Gesamtdrehung, und sie ist tatsächlich die Transponierte "meiner" Matrix. Der Text im Artikel scheint auf Mathworld zurückzugehen, aber merkwürdigerweise sind die Vorzeichen geändert worden. Madyno (Diskussion) 17:37, 16. Aug. 2018 (CEST)
- Bei Mathworld werden andere elementare Drehmatrizen verwendet cos sin/-sin cos statt wie hier cos -sin/sin cos), also anderes Vorzeichen der Winkel.--Claude J (Diskussion) 18:07, 16. Aug. 2018 (CEST)
- Ich glaube nicht ich habe etwas übersehen. Die Berechnungen bei Mathworld stimmen zwar, aber die aufgeführte Matrizen gehen nicht mit dem Text einher. Genau betrachtet berechnet Mathworld der transponierte der Gesamtdrehung, und sie ist tatsächlich die Transponierte "meiner" Matrix. Der Text im Artikel scheint auf Mathworld zurückzugehen, aber merkwürdigerweise sind die Vorzeichen geändert worden. Madyno (Diskussion) 17:37, 16. Aug. 2018 (CEST)
- Das habe ich gar nicht behauptet, irgendwie scheint es hier Verständnisprobleme zu geben. Die inverse Matrix ist die Transponierte bei Drehmatrizen, nur bei deiner Matrix kommt noch ein Vorzeichenwechsel der Drehwinkel hinzu damit sich die Transponierte der Matrix im Artikel ergibt (entweder eine andere Konvention oder du hast was übersehen).--Claude J (Diskussion) 16:39, 16. Aug. 2018 (CEST)
- Nachdem ich nach längerer Zeit mal wieder den Artikel angeschaut habe: Meiner Meinung nach kommt der Unterschied zu Madynos Matrix daher, dass die Matrix im Artikel (und auch ihre Transponierte) nicht stimmt. Zumindest „nicht stimmt“ in dem Sinn, dass sie nicht zu den Abbildungen im Artikel passt. -- HilberTraum (d, m) 17:16, 16. Aug. 2018 (CEST)
- Die Abbildungen würden zur Illustration von aktiven und passiven Drehungen passen. Im Artikel soll M eine passive Drehung sein (steht jedenfalls oben), dann müsste da in der Tat die Transponierte stehen denn die üblichen Defintionen in der Physik gehen von aktiver Drehung aus (Drehung eines starren Körpers in die neue Lage und Koordinaten im Laborsystem). Man müsste also die Matrix dort als M^T bezeichnen und sagen, dass das die in der Physik häufigste Definition der Drehmatrix mit Eulerwinkel ist, und M ist das was unten als M^T bezeichnet ist. In der englischen Wiki werden gleich nur aktive Drehungen betrachtet. PS: kann aber auch sein das da oben bei der Definition passiv/aktiv was fehlgelaufen ist--Claude J (Diskussion) 17:42, 16. Aug. 2018 (CEST)
- Das hört sich an ob da nur eine Kleinigkeit übersehen ist, aber es reicht nicht aus, denn die Vorzeichen der Winkeln müssen auch geändert werden.Madyno (Diskussion) 17:57, 16. Aug. 2018 (CEST)
Ich kann noch sagen dass wenn man Mathworld so interpretiert dass die Drehungen beschrieben werden im Körpereigenem System des Objektes, das Ergebnis die Einheitsvectoren (Achsen) des festen Systems xyz im System XYZ des Korpers nach der Drehung beschreibt. Ob das auch so gemeint ist weiss ich wirklch nicht, aber werde ich mal von Mathworld hören, weil ich mit ihnen im Kontakt bin. Madyno (Diskussion) 17:57, 16. Aug. 2018 (CEST)
- Ja, Madyno, ich denke du hast recht: Das Problem ist nicht nur die Interpretation von „aktive Drehung“ und „passive Drehung“, sondern man muss auch den Unterschied zwischen dem mitbewegten und dem festen Koordinatensystem beachten. Dein Deutsch ist zwar etwas schwer verständlich ;) aber mMn Meinung nach stimmt deine Herleitung und deine Rechnung (in dem Sinn, dass sie zu den Abbildungen passen). Das wäre dann aber eine „aktive“ Drehung, oder? -- HilberTraum (d, m) 18:13, 16. Aug. 2018 (CEST)
- Ja, es ist eine aktive Drehung. Sie beschreibt die Ausgangslage eines Objektes das auf die angedeutete Weise gedreht wird. Tut mir Leid wegen mein Deutsch, ich mache was ich kann. Aber man muss vorsichtig sein mit der Interpretation: was z.B. versteht man unter die Drehmatrix. Jedenfalls gibt die Matrix die Koordinaten der Bilder X, Y und Z der Einheitsvektoren x, y und z nach der Drehung. Es ist aber immer möglich eine aktive Drehung als passiv aufzufassen. Dann ergeben sich die Koordinaten der Einheitsvektoren x, y und z im gedrehte System aus der transponierte Matrix. Madyno (Diskussion) 20:07, 16. Aug. 2018 (CEST)
- Ich muss mich jetzt wieder für 1 Woche verabschieden. Mit den möglicherweise unterschiedlichen Konventionen bei Eulerwinkeln kenne ich mich ohnehin nicht aus. Ich würde aber sehr darauf achten, dass der Artikel in sich stimmig ist, zwischen aktiver und passiver Drehung klar unterscheidet und ebenso zwischen Drehungen um raumfeste vs. körperfeste Achsen. Gutes Deutsch lässt sich ja in gemeinsamer Arbeit leicht erreichen. Bis später! --Bleckneuhaus (Diskussion) 21:47, 16. Aug. 2018 (CEST)
- Ich habe mir das noch mal bei Goldstein angesehen, das ist dort anscheinend als Transformation eines raumfesten Koordinatensystems in ein körperfestes dargestellt zu sein (oder anders betrachtet des entsprechenden starren Körpers) in mehreren Zwischenschritten, wobei da jeweils im neuen Koordinatensystem (intrinsisch) weitergedreht wurde. Das entspräche einer passiven Transformation mit intrinsisch definierten Winkeln als Parametern der Drehung. Nach hiesiger Definition wäre das passiv, aber nicht einfach die Umkehrung der aktiven Drehung (also die Transponierte) sondern mit negativen Winkeln (wird z.B. deutlich wenn man den Fall betrachtet, dass nur die erste Drehung um alpha ungleich null ist, sie sollte bei passiven Transformationen eigentlich umgekehrtes Vorzeichen haben). Wahrscheinlich stammt deshalb auch die andere Darstellung bei Mathworld mit im Vergleich zu hier negativen Drehwinkeln in den Elementarmatrizen.--Claude J (Diskussion) 08:01, 17. Aug. 2018 (CEST)
- Habe den Text überarbeitet.--Claude J (Diskussion) 11:02, 17. Aug. 2018 (CEST)
- Das mit dem Vorzeichen des Winkels verstehe ich noch nicht. Wenn das passive Drehungen sind, dann wurde das Koordinatensystem mathematisch negativ gedreht. --Digamma (Diskussion) 11:28, 17. Aug. 2018 (CEST)
- Ja, deshalb ist bei Mathworld auch so vorgegangen. In der Physik-Literatur werden sie aber häufig anders definiert, so wie bei Goldstein. Trotzdem sind es passive Drehungen. Der schreibt denn auch dass die Definitionen nicht eindeutig sind und ein Blick in die Literatur bestätigt das auch. Die Definition bei Goldstein ist dabei sehr verbreitet.--Claude J (Diskussion) 11:33, 17. Aug. 2018 (CEST)
- Danke für dein Engagement im Artikel, aber worin genau besteht jetzt die Korrektur? Ich habe etwas den Überblick verloren, aber ich dachte wir waren gestern soweit gekommen, dass die Matrix im Artikel nicht stimmt (also nicht zum Text und zu den Bildern passt). An der Matrix wurde aber gar nichts geändert. -- HilberTraum (d, m) 13:56, 17. Aug. 2018 (CEST)
- Ja, deshalb ist bei Mathworld auch so vorgegangen. In der Physik-Literatur werden sie aber häufig anders definiert, so wie bei Goldstein. Trotzdem sind es passive Drehungen. Der schreibt denn auch dass die Definitionen nicht eindeutig sind und ein Blick in die Literatur bestätigt das auch. Die Definition bei Goldstein ist dabei sehr verbreitet.--Claude J (Diskussion) 11:33, 17. Aug. 2018 (CEST)
- Die Matrix ist korrekt (bzw. folgt eine der am häufigsten benutzten Versionen - es gibt mehrere Varianten- um eine Drehung mit Eulerwinkeln darzustellen), unklar war wohl was sie genau beschrieb bzw. welche Konventionen verwendet wurden. M beschreibt wie auch weiter oben definiert wurde eine passive Drehung. Die andere hier diskutierte Matrix beschreibt eine aktive Drehung.--Claude J (Diskussion) 15:43, 17. Aug. 2018 (CEST)
- In Herbert Goldstein et al.: Klassische Mechanik. 3. Auflage, sind auf Seite 163 die Vorzeichen anders als im Artikel. Selbst wenn die Matrix im Artikel korrekt wäre (was sie nicht ist), passt sie nicht mit dem Beleg zusammen. -- HilberTraum (d, m) 16:36, 17. Aug. 2018 (CEST)
- Das mit dem Vorzeichen des Winkels verstehe ich noch nicht. Wenn das passive Drehungen sind, dann wurde das Koordinatensystem mathematisch negativ gedreht. --Digamma (Diskussion) 11:28, 17. Aug. 2018 (CEST)
- Habe den Text überarbeitet.--Claude J (Diskussion) 11:02, 17. Aug. 2018 (CEST)
- Ich habe mir das noch mal bei Goldstein angesehen, das ist dort anscheinend als Transformation eines raumfesten Koordinatensystems in ein körperfestes dargestellt zu sein (oder anders betrachtet des entsprechenden starren Körpers) in mehreren Zwischenschritten, wobei da jeweils im neuen Koordinatensystem (intrinsisch) weitergedreht wurde. Das entspräche einer passiven Transformation mit intrinsisch definierten Winkeln als Parametern der Drehung. Nach hiesiger Definition wäre das passiv, aber nicht einfach die Umkehrung der aktiven Drehung (also die Transponierte) sondern mit negativen Winkeln (wird z.B. deutlich wenn man den Fall betrachtet, dass nur die erste Drehung um alpha ungleich null ist, sie sollte bei passiven Transformationen eigentlich umgekehrtes Vorzeichen haben). Wahrscheinlich stammt deshalb auch die andere Darstellung bei Mathworld mit im Vergleich zu hier negativen Drehwinkeln in den Elementarmatrizen.--Claude J (Diskussion) 08:01, 17. Aug. 2018 (CEST)
- Ich muss mich jetzt wieder für 1 Woche verabschieden. Mit den möglicherweise unterschiedlichen Konventionen bei Eulerwinkeln kenne ich mich ohnehin nicht aus. Ich würde aber sehr darauf achten, dass der Artikel in sich stimmig ist, zwischen aktiver und passiver Drehung klar unterscheidet und ebenso zwischen Drehungen um raumfeste vs. körperfeste Achsen. Gutes Deutsch lässt sich ja in gemeinsamer Arbeit leicht erreichen. Bis später! --Bleckneuhaus (Diskussion) 21:47, 16. Aug. 2018 (CEST)
- Ja, es ist eine aktive Drehung. Sie beschreibt die Ausgangslage eines Objektes das auf die angedeutete Weise gedreht wird. Tut mir Leid wegen mein Deutsch, ich mache was ich kann. Aber man muss vorsichtig sein mit der Interpretation: was z.B. versteht man unter die Drehmatrix. Jedenfalls gibt die Matrix die Koordinaten der Bilder X, Y und Z der Einheitsvektoren x, y und z nach der Drehung. Es ist aber immer möglich eine aktive Drehung als passiv aufzufassen. Dann ergeben sich die Koordinaten der Einheitsvektoren x, y und z im gedrehte System aus der transponierte Matrix. Madyno (Diskussion) 20:07, 16. Aug. 2018 (CEST)

- Du hast recht, Goldstein benutzt dieselbe Konvention wie Mathworld. Habe das jetzt nach Goldstein geändert.--Claude J (Diskussion) 17:33, 17. Aug. 2018 (CEST)
- @Claude J: Gerade da es so viele unterschiedlichen Konventionen gibt, sollten wir sehr klar darstellen, welcher wir folgen. Weniger dadurch, dass wir auf die entsprechenden Quellen verweisen (damit kann ein Leser nämlich nichts anfangen), sondern zum Beispiel dadurch, dass wird die aus der Abbildung benutzen. Die Abbildung zeigt jedem klar, um welche Achsen gedreht wird und wie die Winkel bezeichnet und in welche Richtung sie gemessen werden. Dann muss nur noch angegeben werden, dass man die Matrix der Koordinatentransformation (passive Drehung, d.h. wie berechnen sich die Koordinaten bezüglich des neuen Koordinatensystems aus den Koordinaten bezüglich des alten) angibt und nicht die der aktiven Drehung. Noch besser wäre es wahrscheinlich, beide anzugeben und natürlich deutlich zu machen, welche Matrix was beschreibt. --Digamma (Diskussion) 17:09, 17. Aug. 2018 (CEST)
- o.k. ich gebe beide an, positive und negative Drehung der Elementarmatrizen. Die ursprüngliche Absicht im Artikel war wohl mathematisch positive Drehung bei den Winkeln wie in der Abb. zu verwenden (die ist allerdings dieselbe wie bei Goldstein) und das sollte einheitlich sein auch mit den anderen Fällen.--Claude J (Diskussion) 17:40, 17. Aug. 2018 (CEST)
- Ich habe immer noch Probleme mit den Vorzeichen. Die Matrix
- beschreibt eine aktive Drehung um den (mathematisch positiv gezählten) Winkel . Eine passive Drehung wird durch die Matrix
- beschrieben. --Digamma (Diskussion) 18:43, 17. Aug. 2018 (CEST)
- Vielleicht bin ich ja zu pessimistisch, aber ich fürchte, dieser Artikel wird erst dann korrekt sein, wenn sich irgendwann mal zufälligerweise in allen Abschnitten die Vorzeichenfehler gegenseitig aufheben.
 -- HilberTraum (d, m) 19:20, 17. Aug. 2018 (CEST)
-- HilberTraum (d, m) 19:20, 17. Aug. 2018 (CEST)
- Das heisst nur dass die Literatur konsultiert werden muss, versuche gerade das hier. Im Augenblick leuchtet mir die Wahl der Elementarmatrizen bei der y-Konvention zyz nicht ein (das sollte eigentlich was die Elementarmatrizen betrifft so wie bei zxz sein nur natürlich y-matrix statt x-matrix, ein Winkel hat aber anderes Vorzeichen).--Claude J (Diskussion) 19:57, 17. Aug. 2018 (CEST)
- Ich denke, genau das ist das Problem dieses Artikels: Das Thema ist relativ schwierig, braucht viel Literaturrecherche nach den üblichen Konventionen und dann sind schließlich einige Reihenfolgen und Vorzeichen anders, als man intuitiv erwartet. Alle paar Jahre scheint sich hier jemand die Mühe zu machen, das zu korrigieren. Und dann werden nach und nach willkürlich Vorzeichen geändert, wie sie „intuitiv richtiger“ scheinen, ohne den Rest des Artikels anzupassen. Irgendwann geht dann wieder alles von vorne los. -- HilberTraum (d, m) 20:22, 17. Aug. 2018 (CEST)
- Also Goldstein bzw. Mathworld sind doch schon mal eine gute Grundlage. Bei der Websuche nach Literatur habe ich allerdings festgestellt, dass ganz oft die Matrizen für die aktive Drehung angegeben werden. Die sollten also auf jeden Fall hier auch angegeben werden. Wichtiger als die ausmultiplizierte Form scheint mir die Angabe der drei Einzeldrehmatrizen in der richtigen Reihenfolge zu sein. Zur Drehung um die y-Achse: Die Koordinaten werden gegenüber der um die x-Achse zyklisch vertauscht. Näheres dazu sollte man im Artikel Drehmatrix finden. --Digamma (Diskussion) 20:29, 17. Aug. 2018 (CEST)
- Ich denke, genau das ist das Problem dieses Artikels: Das Thema ist relativ schwierig, braucht viel Literaturrecherche nach den üblichen Konventionen und dann sind schließlich einige Reihenfolgen und Vorzeichen anders, als man intuitiv erwartet. Alle paar Jahre scheint sich hier jemand die Mühe zu machen, das zu korrigieren. Und dann werden nach und nach willkürlich Vorzeichen geändert, wie sie „intuitiv richtiger“ scheinen, ohne den Rest des Artikels anzupassen. Irgendwann geht dann wieder alles von vorne los. -- HilberTraum (d, m) 20:22, 17. Aug. 2018 (CEST)
- Das heisst nur dass die Literatur konsultiert werden muss, versuche gerade das hier. Im Augenblick leuchtet mir die Wahl der Elementarmatrizen bei der y-Konvention zyz nicht ein (das sollte eigentlich was die Elementarmatrizen betrifft so wie bei zxz sein nur natürlich y-matrix statt x-matrix, ein Winkel hat aber anderes Vorzeichen).--Claude J (Diskussion) 19:57, 17. Aug. 2018 (CEST)
- Vielleicht bin ich ja zu pessimistisch, aber ich fürchte, dieser Artikel wird erst dann korrekt sein, wenn sich irgendwann mal zufälligerweise in allen Abschnitten die Vorzeichenfehler gegenseitig aufheben.
- Ich habe immer noch Probleme mit den Vorzeichen. Die Matrix
- Jetzt dürfte das stimmig sein. Allerdings ist die Unterscheidung aktive-passive Drehung auch physikalisch sehr wichtig und nicht selbsterklärend, was da im Augenblick steht reicht nicht. Das müsste noch ausführlicher erläutert werden. Der Abgleich mit der Literatur muss auch noch fortgesetzt werden, einmal für Ergänzungen und außerdem ist das beste Mittel gegen Änderungen Literaturreferenzen. Das Problem mit den ständigen Änderungen gab es auch bei den dem Jones-Formalismus bei der Polarisation, mit ähnlichem Lehrbuchchaos in den Konventionen (wurde dauernd geändert, etwas weniger nachdem genaue Referenzen den Text festnagelten und detaillierten Erläuterungen der Abweichungen). PS: Drehfolgen in der Fahrzeugtechnik müsste man auch checken.--Claude J (Diskussion) 23:19, 17. Aug. 2018 (CEST)


Ich glaube meine Augen nicht: mehr als 50 Änderungen und noch immer Unsinn! Ich habe oben doch deutlich gemacht wo es lang geht! Ich wiederhole kurz:
Die z-x'-z"-Konvention (intrinsich) bedeutet: das XYZ-system wird gedreht um z mit (Matrix A), dann um x' mit (Matrix B), und um z" mit (Matrix C. Dazugehörige Matrix . Darin ist
- ,

Die Matrix findet man wenn man bedenkt das zuerst zurückgedreht werden muss um z mit , wonach man die Drehung um x mit ausführen kann, und schlieslich wieder um z mit drehen, also

- ,

mit
Es folgt:
- .

Auf gleicher Weise
- ,

mit
Also ist:

Achte auf die Reihenfolge der Winkeln! Es ergibt sich dass die z-x'-z"-Konvention gleichwertig ist mit der z-x-z-Konvention (extrinsisch), Matrix , mit Drehungen zuerst um der z-Achse mit dem Winkel , dann eine Drehung um der x-Achse mit dem Winkel , und zum schluss eine Drehung um der z-achse mit dem Winkel . Dies lässt sich auch leicht geometrisch nachprüfen.
Betrachtet man die Transponierte der Matrix , dann gillt:
- .

Daher stammen die andere Vorzeichen. Diese Matrix beschreibt die Drehungen im Körpereigen System XYZ, und gibt in diesem System die Koordinaten der Einheitsvektoren der x-, y- und z-Achse. Sie beschreibt also wie das xyz-System gedreht wird im XYZ-System.
Hiermit müsste doch alles klar sein, und endlich mal die richtige Matrix im Artikel erscheinen. Ich habe sie schon irgendwo abgetippt. Madyno (Diskussion) 10:48, 21. Aug. 2018 (CEST)

Die steht da schon längst, auch mit deiner "extrinsischen" Ableitung, allerdings nicht unter M, da dies die passive Matrix ist, sondern M^T, die aktive. Im Artikel stand von Anfang an gleich am Anfang, dass M die passive Matrix sein soll. --Claude J (Diskussion) 21:58, 18. Aug. 2018 (CEST)
- Ich muss mich teilweise entschuldigen, der Unsinn ist teilweise aufgehoben. Jedenfalls stand am 15. August, als ich den Artikel sah, die falsche Matrix im Artikel. Und jetzt ist die Matrix zwar richtig, aber nur wenn sie richtig interpretiert wird. Es bleibt noch immer unverständlich dass von Drehungen um z , x' und z" die Rede ist, und dann aus blauer Himmel eine Matrix erscheint, die auch noch die inverse Matrix der beschriebene Vorgang vorstellt, und auch in z.B. der englische Wikipedia als ihre Transponierte steht. Das wird eine dauernde Quelle von Verwirrung sein. Ich denke es wäre hilfreich wenn etwas meiner oben geschriebene Erläuterung auch im Artikel kommt. Jedenfalls sollte es dem Leser deutlich sein, wie die in Worten beschriebene Vorgang in Matrizen umgewandelt wird. Madyno (Diskussion) 20:21, 24. Aug. 2018 (CEST)
- Ich werde, sobald ich dazu komme, dies ergänzen. Als Mathematiker halte ich es auch für sinnvoll, zunächst die Matrix für die aktive Drehung aufzuführen (die, die du nennst und dann erst die für die Koordinatentransformation (die, die du nennst). Davor sollte ein Abschnitt stehen, der erstens den Unterschied zwischen aktiver und passiver Drehung erklärt und zweitens, wie die Matrizen im intrinsischen Fall und wie im extrinsischen Fall multipliziert werden.
- Ich stelle mir vor, dass zunächst die verschiedenen Arten, Drehungen durch eulersche Winkel zu beschreiben, aufgeführt werden und dann, in einem zweiten Teil erst auf die Matrixdarstellung eingegangen wird. --Digamma (Diskussion) 11:49, 19. Aug. 2018 (CEST)
- Das hört sich recht positiv an. Madyno (Diskussion) 21:14, 19. Aug. 2018 (CEST)
- Unten habe ich im Abschnitt 'Passive und aktive Drehungen' schon kurz zusammengefasst was man mNn darüber sagen muss. Madyno (Diskussion) 06:53, 22. Aug. 2018 (CEST)


Bilder
BearbeitenIch wäre dafür die kleinen Bilder der Einzelrotationen, α: Drehung um z-Achse, β: Drehung um x′-Achse, γ: Drehung um z″-Achse etc. zu löschen, da auf ihnen nichts zu erkennen ist bzw. was zu sehen ist ziemlich durcheinander geht.--Claude J (Diskussion) 18:18, 17. Aug. 2018 (CEST)
- Den Gedanken hatte ich auch schon. --Digamma (Diskussion) 20:00, 17. Aug. 2018 (CEST)
Standard-y-Konvention, Fahrzeugwinkel
BearbeitenBei der "Standard-y-Konvention" stand vorher eine Drehung um die gedrehte y-achse im Uhrzeigersinn als zweiter Schritt, kann durchaus sein dass sich das so in der Literatur findet, nur stand da nichts im Begleittext von. Deshalb habe ich in der Formel nur Drehungen gegen den Uhrzeigersinn genommen (mathematisch positiv). Ähnlich wurde anscheinend bei Fahrzeugtechnik in Gier-Nick-Roll x-y-z verfahren (zweiter Schritt mit mathematisch negativem Drehwinkel um gedrehte y-Achse, wie üblich und in der Definition von M festgelegt passive Drehungen), ohne dass das im Text vermerkt ist, allerdings kann man das der Abbildung entnehmen. Warum die das so machen ist mir nicht ganz klar, vielleicht weil man bei Drehung um die y-Achse im zweiten Schritt von unten auf die Drehebene blickt und es dann das so aussieht als ob es gegen den Uhrzeigersinn wäre. Auf der Abbildung dreht sich dann scheinbar alles im selben Sinn.--Claude J (Diskussion) 08:32, 18. Aug. 2018 (CEST)
- Hallo Claude J, du täuscht dich bei der elementaren Drehung um die y-Achse. Die Matrix für die aktive Drehung in mathematisch positver Richtung ist
- die für die passive Drehung ist demnach
- Nachzulesen im Artikel Drehmatrix im Abschnitt "Drehmatrizen des Raumes ". --Digamma (Diskussion) 09:38, 18. Aug. 2018 (CEST)



Danke, werde das korrigieren, aber die Drehrichtung in der Abbildung ist dann wohl falsch.--Claude J (Diskussion) 09:39, 18. Aug. 2018 (CEST)
- Da ist doch gar keine Abbildung zur Standard-y-Konvention. --Digamma (Diskussion) 09:41, 18. Aug. 2018 (CEST)
- Der "Fahrzeugfall" eins weiter unten.--Claude J (Diskussion) 09:45, 18. Aug. 2018 (CEST)
- Stimmt, da hast du recht. --Digamma (Diskussion) 09:49, 18. Aug. 2018 (CEST)
- Da müsste stehen, vielleicht kann man das retten in dem man das in die Legende schreibt oder man nimmt nur die Abbildung eins drunter.--Claude J (Diskussion) 09:54, 18. Aug. 2018 (CEST)
- Stimmt, da hast du recht. --Digamma (Diskussion) 09:49, 18. Aug. 2018 (CEST)
- Der "Fahrzeugfall" eins weiter unten.--Claude J (Diskussion) 09:45, 18. Aug. 2018 (CEST)

- Wenn ich mich nicht täusche, ist auch die Abbildung darunte falsch. Der Winkel, der mit beschriftet ist, ist tatsächlich . --Digamma (Diskussion) 23:14, 31. Okt. 2018 (CET)
- Jetzt sollte es richtig sein. Habe das Bild auf eine frühere, richtige Version zurückgesetzt. --Digamma (Diskussion) 23:46, 31. Okt. 2018 (CET)


Passive und aktive Drehungen (überarbeitet)
BearbeitenBetrachte vektoren und Drehungen im Raum . Die Einheitsvektoren bilden ein rechtshändiges Koordinatensystem xyz.

- Aktive Drehung
Die aktive Drehung ist gegeben durch den Bilder der Einheitsvektoren im xyz-System:




Ein Vektor wird von aktiv gedreht auf dem vektor


Die Koordinaten des Bildes berechnen sich wie:


- Passive Drehung
Bei einer passive Drehung eines Vektors wird das Koordinatensystem xyz in der gegengesetzte Richtung gedreht mittels der Drehung zu ein zweites rechtshändiges Koordinatensystem XYZ mit als Basisvektoren die Bilder der Einheitsvektoren im xyz-System unter der Drehung :






[Stimmt dies? Oder wird als die passive Drehung aufgefasst]

Ein Vektor hat im XYZ-System die Koordinaten , d.h.


Also ist

Die Koordinaten von im XYZ-System berechnen sich wie:


NB. Achte auf den Unterschied zwischen und .


Dieselbe Drehung kan betrachtet werden als aktive Drehung: oder als passive Drehung: . In diesem Fall ist zwar , aber mit unterschiedene Bedeutung. Madyno (Diskussion) 00:21, 4. Nov. 2018 (CET)




- @Madyno: ich habe betrachtet und geachtet, aber ich habe noch nicht verstanden, was Du mir über den Artikel sagen möchtest. Eine Vorlesung in Geoemtrie habe ich schon einmal besucht. Was genau soll am Artikel verändert werden.--Alturand…D 09:46, 23. Aug. 2018 (CEST)
- Ich glaube, das soll ein Service sein für denjenigen, der vor hat, den Unterschied zwischen aktiver und passiver Drehung im Artikel zu behandeln, siehe Abschnitt darüber. Damit bin wohl ich gemeint. Möglicherweise möchte Madyno das auch selbst einfügen und stellt deshalb vorher seinen Vorschlag zur Diskussion. --Digamma (Diskussion) 09:56, 23. Aug. 2018 (CEST)
- PS: Ich sehe gerade, dass er dies oben auch schreibt: "Unten habe ich im Abschnitt 'Passive und aktive Drehungen' schon kurz zusammengefasst was man mNn darüber sagen muss." --Digamma (Diskussion) 09:59, 23. Aug. 2018 (CEST)
So ist es tatsächlich gemeint. In der NL-Wikipedia gab es kein derartiges Artikel, und weil ich gerade dort ein neuer Artikel geschrieben habe, und Digamma angab den betreffenden Abschnitt überarbeiten zu wollen, habe ich hier eine kurzfassung eingefügt. Madyno (Diskussion) 10:59, 23. Aug. 2018 (CEST)
- Ich denke, so eine ausführliche Erklärung hat ihren Platz im Artikel Drehmatrix.
- Hier genügt es, jeweils zu erklären, was die angegebene Matrix jeweils darstellt. --Digamma (Diskussion) 12:07, 23. Aug. 2018 (CEST)
Das wäre bestimmt besser, aber bisher war nur in diesem Artikel von aktive und passive Drehungen die Rede.Madyno (Diskussion) 22:13, 23. Aug. 2018 (CEST)
Ich habe noch einiges an der Notation geändert. Madyno (Diskussion) 19:31, 25. Aug. 2018 (CEST)
Überarbeitet
Bearbeiten@Madyno, Claude J, Alturand, HilberTraum, Bleckneuhaus: Ich habe den Artikel nun weitgehend überarbeitet. Schaut mal, ob das so passt. Die letzten Abschnitte müssen noch überarbeitet werden.
Passt das mit der geänderten Reihenfolge (Matrixdarstellung nach hinten verschoben)?
Ich habe die aktiven Drehmatrizen genannt (wie im Artikel Drehmatrix), die passiven . Letzteres ist auf meinem eigenen Mist gewachsen. Trotzdem OK?

Einzelnachweise muss ich noch unterbringen. Die Darstellung folgt teilweise dem englischsprachigen Artikel (vor allem der Aufbau), ist aber nicht direkt übersetzt.
Könnte jemand die Matrizen überprüfen? --Digamma (Diskussion) 23:09, 31. Okt. 2018 (CET) Ping @Wruedt: --Digamma (Diskussion) 20:47, 3. Nov. 2018 (CET)
- @Digamma: Wollt mir das eigentlich nicht antun. In konkreten Fällen werden die Matrizen der Elementardrehung ohnehin numerisch multipliziert. Glaub kaum, dass jemand noch hergeht die komplette Matrix symbolisch auszurechnen mit dem Risiko dass er sich irgendwo vertippt. Ein Programm zur symbolischen Berechnung von Ausdrücken hab ich leider nicht auf meinem PC. Von daher ist die Frage, ob man es bei den Elementarmatrizen beläßt.--Wruedt (Diskussion) 22:07, 3. Nov. 2018 (CET)
- Danke für die Rückmeldung. Sie zeigt auf jeden Fall, dass es wichtiger ist, zu beschreiben, wie sich die Drehung aus Elementardrehungen zusammensetzt, als die ausmultiplizierte Matrix anzugeben. --Digamma (Diskussion) 11:08, 4. Nov. 2018 (CET)
- Ich habe die Einzelheiten nicht mehr überprüft, aber die Einleitung (nur unwesentlich) verbessert. Insoweit macht der Artikel einen sehr guten Eindruck. Danke, Digamma !--Bleckneuhaus (Diskussion) 22:34, 3. Nov. 2018 (CET)
- Danke. --Digamma (Diskussion) 10:56, 4. Nov. 2018 (CET)
- Mir kommt der Artikel reichlich überladen vor. Wozu man aktive und passive Drehungen braucht, erschließt sich mir nicht. In der Praxis hat man ein Basissystem und ein körperfestes System. Es reicht aus, die Drehung vom Basissystem ins körperfeste System zu betrachten und diese Transformationsmatrix zu berechnen. Für den Fall dass man eine Transformation vom Basissystem ins körperfeste System braucht, benutzt man die transponierte.--Wruedt (Diskussion) 07:22, 4. Nov. 2018 (CET)
- Die Intension des Artikels ist unklar. Wer sich auskennt braucht den nicht, andere werden vermutlich eher verwirrt. In der Praxis ist die Transformation vom körperfesten System (große Buchstaben) ins Basissystem (kleine Buchstaben) die häufigste. Warum also fängt man mit X=T*x an und nicht umgekehrt. Beispiel: Ein Auto fährt im Kreis. Bekannt ist die Lage des Schwerpunkts im Basissystem und die Lage der Räder relativ zum Schwerpunkt im körperfesten System. Aufgabe: Wo befinden sich die Räder im Basissystem. Sich nur auf diesen Fall zu beziehen würde den Artikel wesentlich entschlacken. Der Hinweis, dass im umgekehrten Fall die transponierte Matrix benutzt wird (z.B. bei der Transformation von Geschwindigkeiten), steht ja schon drin, geht aber in dem Formelwust völlig unter. IÜ könnte man den Eindruck gewinnen, die Transformation würde nur im Zusammenhang mit Ortskoordinaten benutzt, denn es ist nur von den "Koordinaten eines Punkts" die Rede. Das ist aber deutlich zu eng gefaßt.--Wruedt (Diskussion)
- Es gibt viele verschiedene Gebiete der Wissenschaft und der Technik, die eulersche Winkel benutzen. Du sprichst nur aus der Sicht von einem. Mathematiker sind zum Beispiel in der Regel nicht an Transformationsmatrizen (passive Drehung), sondern an Abbildungsmatrizen (aktive Drehung) interessiert. Eine Menge der Konflikte, die sich weiter oben auf der Diskussionsseite aber auch aus der Versionsgeschichte des Artikels ablesen lassen, stammen von Missverständnissen, um welche Art von Matrizen es sich handelt. und Ich habe sehr lange gebraucht, um das zu verstehen. "Wer sich auskennt, braucht den nicht": Das galt meiner Meinung nach eher für die alte Version. Für jemanden, der Euler-Winkel kennt, aber nur noch die Transformationsmatrix nachschlagen möchte, für den war die alte Version gut. Aber nicht für jemanden, der Euler-Winkel erst verstehen möchte.
- Meine Absicht war tatsächlich nicht, den Artikel zu entschlacken, sondern im Gegenteil, ihn so auszubauen, dass jeder etwas davon hat. Das zitierte Buch von Goldstein betrachtet zum Beispiel nur die Koordinatentransformation vom ortsfesten System ins körperfeste System. Anscheinend braucht der theoretische Physiker diese, und nicht die umgekehrte. Zum letzten Einwand: Dass Vektoren sich genauso transformieren, kann gerne noch ergänzt werden. Aber in der Physik (zum Beispiel bei der Kreiselbewegung) hängen die Eulerschen Winkel selbst von der Zeit ab. Dann transformieren sich Geschwindigkeiten nicht mehr so einfach. --Digamma (Diskussion) 10:53, 4. Nov. 2018 (CET)
- Die Eulerwinkel sind in der TM praktisch immer von der Zeit abhängig. Warum die Transformation der Geschwindigkeit dann schwieriger sein soll erschließt sich nicht. Wenn man die Geschwindigkeit eines Punkts im Auto das im Kreis fährt im Basissystem kennt, ist doch die Frage ob es aus Sicht des Fahrers vorwärts/rückwärts oder sonstwie fährt. Daher ist die Transformation der Geschwindigkeit vom Basissystem ins Fahrzeugystem sinnvoll.
- In der TM ist aber der umgegehrte Fall (Transformation vom körperfesten ins Basissystem der bei weitem häufigere. Das wäre z.B. eine Anmerkung wert. Z.B. sind die Kräfte auf ein Fahrzeug meist im fahrzeugfesten System gegeben. Für dem Impulssatz möchte man aber die Kräfte im Basissystem haben.--Wruedt (Diskussion) 11:55, 4. Nov. 2018 (CET)
- Bin der Meinung dass der Artikel eigentlich nur noch für Experten geeignet ist. Stell mir einen TM-Neuling vor, der vor der Aufgabe steht das oben stehende Beispiel Position eines Rades im Basissystem lösen soll. Benutzt soll die Drehreihenfolge Gier, Nick, Roll. Der muss sich zurechtklamüsern, dass dies eine passive Drehung ist, ein Begriff der in der TM nicht gebraucht wird. Desweiteren muss er jezt noch die richtige Reihenfolge für die Multiplikation der Elementarmatrizen im Abschnitt "Kombination von Drehungen" finden (Dass die umgekehrt ist wird ihn vermutlich wundern. Zu guter Letzt muss er noch rausfinden dass er nicht die überstrichene Matrix sondern R benutzen muss. Wenn da nicht was schief geht.
- Dass hier dermaßen auf der aktiven Drehung rumgeritten wird, kann ich mir bei Ortsvektoren noch als einigermaßen sinnhaft vorstellen. Was das aber bei Kräften soll wissen die Götter. Es kann eigentlich nicht sein, dass der Hauptanwendungsfall TM derart unter die Räder kommt.--Wruedt (Diskussion) 16:26, 4. Nov. 2018 (CET)
- OK. Das liegt daran, dass ich Mathematiker bin. Aktive Drehungen sind das, was Mathematiker betrachten: Abbildungsmatrizen. Deshalb haben immer wieder Mathematiker die Matrizen geändert, weil sie dachten, es wäre von Abbildungsmatrizen die Rede. Ich weiß nicht, ob TM der Hauptanwendungsfall ist. Die Quelle, auf der der Artikel schon immer beruhte, ist das Buch von Goldstein, und da geht es nicht um Technische Mechanik, sondern um Theoretische Physik. Aber ich nehme Anregungen gerne auf. Du kannst auch gerne Teile umschreiben oder ergänzen. Mir war es wichtig, dass erst einmal sauber erklärt wird, welche Drehungen überhaupt durchgeführt werden. Nochmal: Dein TM-Neuling ist nur einer von vielen, die den Artikel lesen. Ich habe versucht, bei allen Matrizen klar zu machen, was sie beschreiben. Ich kann auch gerne die Begriffe der technischen Mechanik stärker betonen bzw. auf die Anwendungsfälle eingehen (letzteres muss vielleicht jemand anderes machen). Meiner Meinung nach war der Artikel vorher aber für niemanden geeignet (zumindest nicht die Aussagen über Matrizen), da er nicht gesagt hat, was für Matrizen da angegeben werden.
- --Digamma (Diskussion) 17:54, 4. Nov. 2018 (CET)
- Dann hätt ich einen Vorschlag wie man doch noch zusammen kommt. Die Mathematiker sind doch zur Abstraktion fähig. Wenn man also zunächst (als Einstieg) nur die passiven Drehungen betrachtet und hier die Transformation vom körperfesten ins Basissystem nimmt, kann man bei der Multiplikation der Elementarmatrizen die nicht gestrichenen R's in der Reihenfolge der entsprechenden Konvention benutzen, was einsichtig ist. Es sollte mit entsprechendem Abstraktionsvermögen gelingen aus einer passiven ein aktive abzuleiten. Wie man letzlich die Transponierte einer Matrixmultiplikation berechnet, ist reinste Mathematik. Vielleicht läßt sich sowas durch Umgruppierung vorhandener Textpassagen erreichen, nach dem Motto: vom Einfachen zum Schwierigen. Mir ist aber schon klar, dass nicht jeder drauf los editieren sollte, sonst geht jegliche Struktur verloren. In der vorhandenen Fassung denk ich aber, dass Anwendungsfall TM nur über etliche Ecken zu erschließen ist und dass nur Ortsvektoren aber keine Kräfte, ... betrachtet werden. für die eine aktive Drehung eh keinen Sinn macht.--Wruedt (Diskussion) 18:32, 4. Nov. 2018 (CET)
- OK. Ich werde das mal versuchen, falls hier niemand widerspricht. Den Zugang habe ich auch in der Literatur gefunden. Wird aber eine Weile dauern bis ich Zeit dazu finde. --Digamma (Diskussion) 19:12, 4. Nov. 2018 (CET)
- Dann hätt ich einen Vorschlag wie man doch noch zusammen kommt. Die Mathematiker sind doch zur Abstraktion fähig. Wenn man also zunächst (als Einstieg) nur die passiven Drehungen betrachtet und hier die Transformation vom körperfesten ins Basissystem nimmt, kann man bei der Multiplikation der Elementarmatrizen die nicht gestrichenen R's in der Reihenfolge der entsprechenden Konvention benutzen, was einsichtig ist. Es sollte mit entsprechendem Abstraktionsvermögen gelingen aus einer passiven ein aktive abzuleiten. Wie man letzlich die Transponierte einer Matrixmultiplikation berechnet, ist reinste Mathematik. Vielleicht läßt sich sowas durch Umgruppierung vorhandener Textpassagen erreichen, nach dem Motto: vom Einfachen zum Schwierigen. Mir ist aber schon klar, dass nicht jeder drauf los editieren sollte, sonst geht jegliche Struktur verloren. In der vorhandenen Fassung denk ich aber, dass Anwendungsfall TM nur über etliche Ecken zu erschließen ist und dass nur Ortsvektoren aber keine Kräfte, ... betrachtet werden. für die eine aktive Drehung eh keinen Sinn macht.--Wruedt (Diskussion) 18:32, 4. Nov. 2018 (CET)
@Digamma: Du hast eine ausführliche Arbeit geschaft. Bevor ich aber mich bemühe sämtliche Sachen zu überprüfen, hätte ich gerne Folgendes geklärt. Du schreibst, ohne weitere Begründung: Allgemein ist die Transformationsmatrix einer passiven Drehung gleich der Inversen der Abbildungsmatrix R der aktiven Drehung. Im Artikel steht: ... passiver oder Alias-Drehung (die Matrix gibt die Koordinaten der ursprünglichen Basisvektoren bezüglich des gedrehten Koordinatensystems an). Davon gehe ich in meiner obigen Analyse aus und es kommt aber hervor dass beide Matrizen gleich sind. Wieder ein Punkt von Verwirrung. Teilweise nur eine Sache der Vereinbarung, aber auch van Konvention und Konsekwens. Mache ich einen Fehler? Worum es sich dreht (!) ist eigentlich die Frage was man vereinbart unter passive Drehung zu verstehen. D.h. Nennt man die Matrix der Übergang der ursprungliche Basis auf den neuen Basis die passive Drehung oder deren Inversen.Madyno (Diskussion) 11:54, 5. Nov. 2018 (CET)

- Bei der passiven Drehung wird das Koordinatensystem gedreht. Aber nicht um , sondern um . Dies entspricht einer aktiven Drehung um den Winkel . Oder anders ausgedrückt: Dieselbe Matrix beschreibt einerseits eine aktive Drehung um den Winkel und andererseits eine passive Drehung um den Winkel . --Digamma (Diskussion) 18:11, 5. Nov. 2018 (CET)
Es ist natürlich egal ob man von oder spricht. Es geht darum was eine passive Drehung um den Winkel bedeutet. Ich habe die Idee es bedeutet eine Drehung des Koordinatensystems um . Und weil diese Drehung eine aktieve Drehung ist, wurde der zugehörige Matrix die Inverse sein einer (normalen) aktiven Drehung um . Aber dann beschreibt die Matrix selbst die Transformation der Koordinaten. D.h. eine Rotation entweder aufgefasst als eine aktieve oder als eine passieve Rotation wird von derselbe Matrix beschrieben. Ich bin mir auch nicht 100% sicher, es hängt nur davon ab was man unter eine passieve Drehung um den Winkel versteht (will verstehen).Madyno (Diskussion) 19:48, 5. Nov. 2018 (CET)
- Hab das Gefühl die Verwirrung wird nicht enden. In der TM sind die Elementarmatrizen die Transformationsmatrizen vom körperfesten System in das Basissystem. Beispiel Drehung um die z-Achse

- ergo wird ein Vektor im körperfesten System ins Basissystem so transformiert:
- In Artikel wird für den TM-Fall (im Mathe-Jargon passsive Drehung) aber die umgekehrte Transformation hingeschrieben (R transponiert). Das ist extrem verwirrend.
- --Wruedt (Diskussion) 19:53, 6. Nov. 2018 (CET)

- Als Elementarmatrizen würde ich die gleichen bezeichnen wie du, sie aber nicht als Transformationsmatrizen für die Koordinatentransformation vom körperfesten ins raumfeste Koordinatensystem betrachten, sondern als Abbildungmatrizen.
- Quetsch Wruedt: Das scheint mir das Hauptproblem zu sein. Nehmen wir nochmal das Beispiel von oben (Elementarmatrix bei Drehung um die z-Achse
- Wenn's sonst keine Eulerwinkel gibt, wird ergo ein Vektor im körperfesten System ins Basissystem so transformiert:
- Wenn R_z also die Transformation vom körperfesten ins Basissystem ist, warum solll's dann ne Abbildungsmatrix und keine Transformationsmatrix sein?--Wruedt (Diskussion) 07:23, 7. Nov. 2018 (CET)
- Weil Mathematiker sich weniger für Koordinatentransformationen und mehr für Abbildungen interessieren. Der Körper (z.B. das Fahrzeug) wird gedreht und man interessiert sich für die rechnerische Behandlung dieser Drehung. Das gedrehte Koordinatensystem interessiert da gar nicht. --Digamma (Diskussion) 08:35, 7. Nov. 2018 (CET)
- Da scheint mir jetzt ein entscheidender Unterschied zu liegen. In der TM möchte man wissen wie sich Vektoren im körperfesten System im Basisystem darstellen. Um beim Flugzeug zu bleiben z.B. Widerstand, Querkraft, Auftrieb die im körperfesten System gegeben sind im Inertialsystem. Wenn die obige Matrix beim Primitivbeispiel oben (nur z-Drehung) aber keine Transformationsmatrix vom körperfesten ins Basissystem sein sollte, garantiere ich, dass niemand den Artikel versteht. Dass die obige Gleichung die richtige Transformation vom körperfesten ins Basissystem beschreibt, ist doch nicht zu bestreiten. Ganz leicht nachzuvollziehen indem man den Vektor X=1,Y=0,Z=0 transfomiert, dann kommt x=cos(alpha), y=sin(alpha), z=0 raus.--Wruedt (Diskussion) 15:31, 7. Nov. 2018 (CET)
- Ich glaube, du missverstehst mich: Die obige Matrix ist beides: Transformationsmatrix für die Koordinatentransformation vom körperfesten ins raumfeste System und Abbildungsmatrix. Für die TM ist der eine Aspekt wichtig, für den Mathematiker der andere. --Digamma (Diskussion) 18:05, 7. Nov. 2018 (CET)
- Danke; Heureka: Wenn das jetzt so im Artikel drin steht, verstehen das vielleicht doch ein paar mehr Leute. Der Begriff passive Drehung ist dagegen nicht so geläufig und muss nicht so im Vordergrund stehen. Die transponierten Elementarmatrizen braucht imo kein Mensch und sollten wegfallen, sie dienen nur der Verwirrung. Nur bei der Gesamtmatrix macht die transponierte Sinn, falls vom Basissystem ins körperfeste transformiert werden soll.--Wruedt (Diskussion) 18:20, 7. Nov. 2018 (CET)
- Die transponierten Elementarmatrizen müssen schon in den Artikel, denn sie stehen im Goldstein (einem Standardwerk der theoretischen Physik) und im Artikel in MathWorld. --Digamma (Diskussion) 18:52, 7. Nov. 2018 (CET)
- Ich habe nun die aktiven und passiven Drehungen aus der Einleitung entfernt und stattdessen von Abbildungsmatrizen einerseits und Transformationsmatrizen für Koordinatentransformationen andererseits geschrieben. Wenn das so passt, werde ich auch den Hauptteil entsprechend überarbeiten. --Digamma (Diskussion) 20:56, 7. Nov. 2018 (CET)
- Die transponierten Elementarmatrizen müssen schon in den Artikel, denn sie stehen im Goldstein (einem Standardwerk der theoretischen Physik) und im Artikel in MathWorld. --Digamma (Diskussion) 18:52, 7. Nov. 2018 (CET)
- Danke; Heureka: Wenn das jetzt so im Artikel drin steht, verstehen das vielleicht doch ein paar mehr Leute. Der Begriff passive Drehung ist dagegen nicht so geläufig und muss nicht so im Vordergrund stehen. Die transponierten Elementarmatrizen braucht imo kein Mensch und sollten wegfallen, sie dienen nur der Verwirrung. Nur bei der Gesamtmatrix macht die transponierte Sinn, falls vom Basissystem ins körperfeste transformiert werden soll.--Wruedt (Diskussion) 18:20, 7. Nov. 2018 (CET)
- Ich glaube, du missverstehst mich: Die obige Matrix ist beides: Transformationsmatrix für die Koordinatentransformation vom körperfesten ins raumfeste System und Abbildungsmatrix. Für die TM ist der eine Aspekt wichtig, für den Mathematiker der andere. --Digamma (Diskussion) 18:05, 7. Nov. 2018 (CET)
- Da scheint mir jetzt ein entscheidender Unterschied zu liegen. In der TM möchte man wissen wie sich Vektoren im körperfesten System im Basisystem darstellen. Um beim Flugzeug zu bleiben z.B. Widerstand, Querkraft, Auftrieb die im körperfesten System gegeben sind im Inertialsystem. Wenn die obige Matrix beim Primitivbeispiel oben (nur z-Drehung) aber keine Transformationsmatrix vom körperfesten ins Basissystem sein sollte, garantiere ich, dass niemand den Artikel versteht. Dass die obige Gleichung die richtige Transformation vom körperfesten ins Basissystem beschreibt, ist doch nicht zu bestreiten. Ganz leicht nachzuvollziehen indem man den Vektor X=1,Y=0,Z=0 transfomiert, dann kommt x=cos(alpha), y=sin(alpha), z=0 raus.--Wruedt (Diskussion) 15:31, 7. Nov. 2018 (CET)
- Weil Mathematiker sich weniger für Koordinatentransformationen und mehr für Abbildungen interessieren. Der Körper (z.B. das Fahrzeug) wird gedreht und man interessiert sich für die rechnerische Behandlung dieser Drehung. Das gedrehte Koordinatensystem interessiert da gar nicht. --Digamma (Diskussion) 08:35, 7. Nov. 2018 (CET)
- Quetsch Wruedt: Das scheint mir das Hauptproblem zu sein. Nehmen wir nochmal das Beispiel von oben (Elementarmatrix bei Drehung um die z-Achse
- Ich bin mir gar nicht sicher, ob "passive Drehung" tatsächlich Mathe-Jargon ist. Ich habe den Begriff selbst erst vor kurzem kennengelernt. Der Klarheit halber würde ich eigentlich einerseits von "Abbildungsmatrizen" sprechen und andererseits von "Koordinatentransformationsmatrizen".
- Bei der Diskussion weiter oben hatte ich den Eindruck, dass die Unterscheidung zwischen aktiver und passiver Drehung der Klarheit und Verständlichkeit dient. Jetzt sehe ich, dass das wohl eher nicht so ist. Ich bevorzuge deshalb jetzt, nicht von aktiver und passiver Drehung zu sprechen, sondern von Abbildungen (der Raumpunkte) und Abbildungsmatrizen einerseits und von Koordinatentransformationen und Transformationsmatrizen andererseits. Und vielleicht beide Transformationen anzugeben: sowohl die vom körperfesten ins raumfeste als auch umgekehrt.
- Die Transformation vom raumfesten ins körperfeste System steht auf jeden Fall im Goldstein und (aus Goldstein abgeschrieben) bei MathWorld) und sollte schon deshalb drin sein. Das Beispiel mit der Transformation des Gewichtskraftvektors vom raumfesten ins körperfeste System wurde von einem Luftfahrtexperten (Benutzer:Jörg J. Buchholz) hier eingebracht. --Digamma (Diskussion) 20:38, 6. Nov. 2018 (CET)
- Das Beispiel mit der Transformation des Gewichtskraftvektors ins körperfeste System ist schon OK. Nur in der TM werden gefühlt 90% der Transformationen vom körperfesten ins Basissystem verwendet (z.B. die Koordinaten der Anlenkpunkte des Radträgers, der sich im Fahrzeugsystem bewegt). Dann kann auch direkt die Multiplikationsreihenfolge der R's der entsprechenden Konvention benutzt werden. Die transponierten Elementarmatrizen tauchen so praktisch nie auf.--Wruedt (Diskussion) 21:29, 6. Nov. 2018 (CET)
- Ich werde beim Überarbeiten die Transformationsmatrizen für beide Richtungen aufnehmen und jeweils sowohl als Produkt von Elementarmatrizen (bzw. deren Transponierten) und in ausmultiplizierter Form angeben. --Digamma (Diskussion) 21:35, 6. Nov. 2018 (CET)
- Das Beispiel mit der Transformation des Gewichtskraftvektors ins körperfeste System ist schon OK. Nur in der TM werden gefühlt 90% der Transformationen vom körperfesten ins Basissystem verwendet (z.B. die Koordinaten der Anlenkpunkte des Radträgers, der sich im Fahrzeugsystem bewegt). Dann kann auch direkt die Multiplikationsreihenfolge der R's der entsprechenden Konvention benutzt werden. Die transponierten Elementarmatrizen tauchen so praktisch nie auf.--Wruedt (Diskussion) 21:29, 6. Nov. 2018 (CET)
- Als Elementarmatrizen würde ich die gleichen bezeichnen wie du, sie aber nicht als Transformationsmatrizen für die Koordinatentransformation vom körperfesten ins raumfeste Koordinatensystem betrachten, sondern als Abbildungmatrizen.

- PS: woher kommt der Begriff passive Drehung, wenn's kein Mathe-Jargon ist. Mir war der Begriff vor der Disk auch nicht geläufig.--Wruedt (Diskussion) 21:41, 6. Nov. 2018 (CET)
Wenn man die Drehung eines Objektes um den Eulerschen Winkeln im raumfesten System beschreibt, ist die Drehung eine aktive Drehung (Alibi), auch extrinsische Transformation, denn das Objekt wird versetzt. Die Matrix berechnet von den ursprungliche Koordinaten im raumfesten System die neuen Koordinaten im raumfesten System. Beschreibt man dagegen die gleiche Drehung im körperfeste System, so ist sie eine passtive Drehung (Alias), auch intrinsische Transformation, denn das Objekt wird nicht relativ zum System versetzt, nur bezüglich ein anderes, gedrehtes System beschrieben. Das neue System ensteht durch eine Drehung des körperfesten Systems in die gegengesetzte Richtung. Die Matrix berechnet von den ursprungliche Koordinaten im körperfesten System die neuen Koordinaten im neuen raumfesten System. In beiden Fälle handelt es sich dabei um der gleichen Matrix. Madyno (Diskussion) 17:02, 7. Nov. 2018 (CET)
- Ich geb's auf. Spätestens nach dem post versteh ich überhaupt nicht mehr was da eigentlich erklärt werden soll. Es gibt immer nur 2 System, ein Basissystem und ein körperfestes System. Es gibt daher auch kein "neues" Basissystem, sondern die Drehungen gehen immer vom gleichen Basissystem aus. Dem Artikel ist die Unverständlichkeitsvorlage sicher. Wer sich mit Eulerwinkeln auskennt, wendet sich mit Grausen ab, andere bleiben völlig ratlos im Wald der Möglichkeiten zurück. Die Mathe-Brille scheint mir nur einen kleinen Ausschnitt für die praktische Anwendung dieser Winkel zu zeigen.--Wruedt (Diskussion) 18:49, 7. Nov. 2018 (CET)
(Neu gestaltet) Es gibt ein raumfestes System und ein körperfestes System. Koordinaten im raumfesten System schreibe ich zwischen runden Klammern, z.B. . Im körperfesten System zwischen rechte Klammern: .

![{\displaystyle [x,y,z]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/af0bfedf9a4341d42ead3affff487ec9debd8365)
Die Eulerschen Winkel beschreiben die Drehung , und damit auch wie das körperfeste System entsteht durch drehen des raumfesten Systems. Die Beziehung zwischen dem raumfesten System und dem körperfesten System wird bestimmt durch: , und . Das bedeutet auch dass das raumfeste System das Bild ist vom körperfesten System unter der inversen Drehung: , also eine Drehung im gegengesetzte Richtung.
![{\displaystyle [1,0,0]=R(1,0,0),[0,1,0]=R(0,1,0)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/926c3b0ffcf7e064705576ed1c8c1cf31b4547cd)
![{\displaystyle [0,0,1]=R(0,0,1)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2b1429f18ac264dd35f2d5abe18071b906789209)
![{\displaystyle (1,0,0)=R^{*}[1,0,0],(0,1,0)=R^{*}[0,1,0],(0,0,1)=R^{*}[0,0,1],}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5ac1b35a0d3e28de12f5ce51302f01b0f0ce3e40)
Die Drehung um den Eulerschen Winkeln kann beschrieben werden im raumfesten System und im körperfesten System.
Im raumfesten System wird ein Punkt gedreht (abgebildet) zum Punkt , also: . (Aktive Drehung) (Auf der Erde will man wissen wo das Flugzeug sich befindet)



Die Drehung des Punktes kann auch betrachtet werden im körperfesten System. Im körperfesten System wird das Punkt beim drehen nicht versetzt, sondern möchte man seine Koordinaten berechnen im raumfesten System. (Passive Drehung) Also ist

![{\displaystyle p=[x,y,z]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/bb0cd41c59a4b7afa20c09c10c84fd1aee4e5fa4)
![{\displaystyle p=[x,y,z]=x[1,0,0]+y[0,1,0]+z[0,0,1]=xR(1,0,0)+yR(0,1,0)+zR(0,0,1)=R(x,y,z)=(X,Y,Z)}](https://wikimedia.org/api/rest_v1/media/math/render/svg/5aeb2ae6d14e7f4360f16cc248d6cbdae8974757)
(Der Pilot will wissen wo er sich befindet)
Genau gleich wie oben. Man könnte noch schreiben:
- .
![{\displaystyle (X,Y,Z)=X(1,0,0)+...=XR^{*}[1,0,0]+...=R^{*}[X,Y,Z]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/e043c61351a95aafdacef644a5e5e00edd69644f)
Auch dann ergibt sich: . Wie man es auch betrachtet, es ist die Matrix R die die Drehung beschreibt und aus den "alten" Koordinaten die "neue" berechnet.
![{\displaystyle [X,Y,Z]=R[x,y,z]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/dad88371e242cfb60458d443af3ffe7a04384fdd)
Ich habe oben math-code eingefuhrt, damit alles deutlich ist. Es gibt kein logischen Wiederspruch zwischen was ich schreibe und die Auffassung Digamma's, nur liegt die Unterschied darin was man unter eine bestimmte Drehung versteht. I Madyno (Diskussion) 01:21, 10. Nov. 2018 (CET)
- @Madyno: Niemand betrachtet bei Eulerschen Winkel die Drehung in entgegengesetzter Richtung, die das körperfeste System auf das raumfeste abbildet.
- Wenn man von "aktiver" und "passiver" Drehung spricht, dann geht man in der Regel von der Drehmatrix aus, und die Frage ist, wie diese zu interpretieren ist. Und da gibt es dann zwei Möglichkeiten: Eine Drehung der Punkte des Raums um den Winkel oder eine Drehung des Koordinatensystems in entgegengesetzter Richtung.
- Hier in diesem Artikel ist aber sowohl eine Drehung der Raumpunkte (nämlich als Drehung des Körpers) als auch eine Drehung des Koordinatensystems gegeben. Da das Koordinatensystem an den Körper angeheftet ist, wird es gleich wie der Körper gedreht und nicht entgegengesetzt. Deshalb hat die Matrix für die Transformation der Koordinaten eine andere Gestalt als die für die Beschreibung der Abbildung. Sicher: Man möchte beschreiben, wie sich die Koordinaten im körperfesten System in das raumfeste System transformieren, aber man betrachtet dabei nicht die Drehung, die das körperfeste System in das raumfeste dreht, sondern immer nur die Drehung, die das raumfeste System ins körperfeste dreht. Deshalb waren deine Bemerkungen für Wruedt unverständlich. --Digamma (Diskussion) 19:45, 8. Nov. 2018 (CET)
- @Digamma. Danke. Der Erklärung ist nicht's hinzuzufügen--Wruedt (Diskussion) 19:57, 8. Nov. 2018 (CET)
Im Abschnitt aktive und passive Drehungen wird fälschlich behauptet die Matrix R sei die Transformationsmatrix vom Basissystem ins körperfeste System. Wie oben ausgiebig diskutiert ist R aber die Transformationsmatrix vom körperfesten ins Basissystem.
--Wruedt (Diskussion) 22:45, 8. Nov. 2018 (CET)
Sorry stimmt ja doch, ist nur extrem unverständlich formuliert. Wenn man bei passive Drehung umformt statt X=R transponiert*x zu x=R*X ist alles ok. Aber warum schreibt man's nicht direkt so hin. Bin immer noch der Meinung, dass man ohne den Begriff passive Drehung auskommen sollte. Für den TM-Fall jedenfalls ist er nicht gebräuchlich. IMO kommt man auch ohne die transponierten Elementarmatrizen aus, selbst wenn's im Goldstein steht.--Wruedt (Diskussion) 22:59, 8. Nov. 2018 (CET)
Wenn man bei Kombination von Drehungen bei Gier-Nick-Roll und passiver Drehung statt R überstrichen R nehmen würde, hätte man auch nicht die umgekehrte Multiplikationreihenfolge der Elementarmatrizen. Denk dass jemand der nicht im Thema drinsteckt diese "Klimmzüge" nicht versteht. Wer einfach nur die Transformationsmatrix bei Gier-Nick-Roll vom körperfesten ins Basissystem sucht, steht im Wald. Ob er soweit kommt ist auch die Frage, denn statt schlichter Transformation was die Aufgabe ist, wird von passiver Drehung gesprochen. Das mag zwar formal alles OK sein, aber die berüchtigte OMA fängt damit nichts an.--Wruedt (Diskussion) 12:34, 9. Nov. 2018 (CET)
- Wruedt: Ich habe doch oben schon geschrieben: Ich werden diesen Teil umformulieren. Aber nicht jetzt, sondern später, weil mir gerade die Zeit dazu fehlt.
- Zu "Wenn man bei passive Drehung umformt statt X=R transponiert*x zu x=R*X ist alles ok. Aber warum schreibt man's nicht direkt so hin." Weil es in dieser Form im Goldstein und bei Mathworld steht. Es geht eben nicht nur um Technische Mechanik und es gibt genug Leser und Anwender, die sich für die Transformation vom raumfesten ins körperfeste System interessieren. --Digamma (Diskussion) 19:56, 10. Nov. 2018 (CET)
Bearbeitung vom 17. November 2018
BearbeitenHallo Wruedt, ich habe den Teil mit den Matrizen neu bearbeitet (und wieder zu den entsprechenden Euler-Winkel-System eingegliedert). Könntest du mal einen Blick drauf werfen, ob das nun verständlich ist? Viele Grüße, --Digamma (Diskussion) 21:46, 18. Nov. 2018 (CET) @Madyno, Claude J, Alturand, HilberTraum, Bleckneuhaus: --Digamma (Diskussion) 21:47, 18. Nov. 2018 (CET)
- Mich in die Einzelheiten reinzuknien, fehlt mir zZt die Zeit (und Lust). Ich will nur kurz noch von physikalischer Seite einwerfen, dass mir die Begriffe "aktive" und "passive" Drehungen in der Physik(-Lehre) seit 50 Jahren geläufig sind und eine fürs Verständnis hilfreiche Wirkung haben (wobei Vorzeichenfragen ja immer leicht abschrecken können): Man stellt sich immer einen Körper vor. Wird er im Raum gedreht, nennt man das aktive Drehung und muss seinen Punkten nun (im festgehaltenen KS) neue Koordinaten geben. Bleibt hingegen der Körper in Ruhe, während man seine Punkte nun durch die Koordinaten in einem gedrehten KS bezeichnen will, nennt man das passive Drehung. Ist doch ganz einfach und kommt mir auch einfach nur "natürlich vor". --Bleckneuhaus (Diskussion) 22:40, 18. Nov. 2018 (CET)
- Da das System an den Körper gepinnt ist, stellt sich Deine Frage überhaupt nicht. Da der Zweck eine Koordinatentransformation ist, ist der Begriff passive Drehung wie die Disk ausreichend gezeigt hat 1. extrem verwirrend und 2. entbehrlich.--Wruedt (Diskussion) 08:57, 19. Nov. 2018 (CET)
- Ich kann mal versuchen, die Begriffe so zu erwähnen, dass sie nicht verwirren (bzw. so, dass jemand, der sie nicht kennt, sie einfach überliest). Die aktiven Drehungen werden ja schon erwähnt. --Digamma (Diskussion) 15:58, 19. Nov. 2018 (CET)
- @Benutzer:Digamma. Die neue Fassung find ich im wesentlichen OK. Hab noch nicht die Matrizen ausmultipliziert. Wird hoffentlich stimmen. Einziger "Schönheitsfehler" ist z.B. bei Gier-Nick-Roll die Verwendung transponierter Elementarmatrizen und die dadurch umgekehrte Multiplikationsreihenfolge (was kaum einer versteht). Durch den Wegfall der passiven Drehung hat der Artikel aber sehr an Verständlichkeit gewonnen. Danke.--Wruedt (Diskussion) 10:19, 19. Nov. 2018 (CET)
- Danke für die positive Rückmeldung. Den Schönheitsfehler verstehe ich nicht ganz. Wenn ich auch die umgekehrte Transformation, vom raumfesten ins körperfeste System, beschreiben möchte, dann komme ich doch um die transponierten Matrizen nicht herum. Oder? --Digamma (Diskussion) 15:58, 19. Nov. 2018 (CET)
- Ich meinte die Transformation vom körperfesten ins Basissystem. Hier wird aktuell bei der Multiplikation die umgekehrte Reihenfolge der Eulerwinkel verwendet. Man kann auch die nicht transponierten Elementarmatrizen in der Reihenfolge der Drehungen verwenden. Da aber der Artikel insgesamt deutlich an Verständlichkeit zugelegt hat, könnt man's ev. auch so lassen.--Wruedt (Diskussion) 16:08, 19. Nov. 2018 (CET)
- Welches sind für dich denn die transponierten, und welches die nicht-transponierten Elementarmatrizen? Und was heißt "in der Reihenfolge der Drehungen"? Von links nach rechts oder von rechts nach links? --Digamma (Diskussion) 16:13, 19. Nov. 2018 (CET)
- @Digamma: Entschuldigung es ist alles OK. War vor lauter Matrizen vermutlich betriebsblind.--Wruedt (Diskussion) 16:57, 19. Nov. 2018 (CET)
- Welches sind für dich denn die transponierten, und welches die nicht-transponierten Elementarmatrizen? Und was heißt "in der Reihenfolge der Drehungen"? Von links nach rechts oder von rechts nach links? --Digamma (Diskussion) 16:13, 19. Nov. 2018 (CET)
- Ich meinte die Transformation vom körperfesten ins Basissystem. Hier wird aktuell bei der Multiplikation die umgekehrte Reihenfolge der Eulerwinkel verwendet. Man kann auch die nicht transponierten Elementarmatrizen in der Reihenfolge der Drehungen verwenden. Da aber der Artikel insgesamt deutlich an Verständlichkeit zugelegt hat, könnt man's ev. auch so lassen.--Wruedt (Diskussion) 16:08, 19. Nov. 2018 (CET)
- Danke für die positive Rückmeldung. Den Schönheitsfehler verstehe ich nicht ganz. Wenn ich auch die umgekehrte Transformation, vom raumfesten ins körperfeste System, beschreiben möchte, dann komme ich doch um die transponierten Matrizen nicht herum. Oder? --Digamma (Diskussion) 15:58, 19. Nov. 2018 (CET)
- Da das System an den Körper gepinnt ist, stellt sich Deine Frage überhaupt nicht. Da der Zweck eine Koordinatentransformation ist, ist der Begriff passive Drehung wie die Disk ausreichend gezeigt hat 1. extrem verwirrend und 2. entbehrlich.--Wruedt (Diskussion) 08:57, 19. Nov. 2018 (CET)
Psi, Theta, Phi
BearbeitenMich wundert, dass da anscheinend griechische Großbuchstaben verwendet werden. Normalerweise werden Winkel immer mit griechischen Kleinbuchstaben bezeichnet. Steht das wirklich so in den Normen, oder wurden da nur die Großbuchstaben , und mit den sehr ähnlich aussehenden Kleinbuchstaben , und verwechselt? In TeX ist der Unterschied noch relativ groß, weil die Kleinbuchstaben kursiv gedruckt werden, ohne TeX sieht das hier so aus: Ψ, Θ, Φ vs. ψ, θ, ϕ --Digamma (Diskussion) 17:32, 1. Nov. 2018 (CET) @Wruedt: Ich glaube, du könntest dazu etwas sagen. --Digamma (Diskussion) 10:55, 4. Nov. 2018 (CET)


- In DIN 70000 sind Kleinbuchstaben gebräuchlich.--Wruedt (Diskussion) 11:11, 4. Nov. 2018 (CET)
- Danke. --Digamma (Diskussion) 11:49, 4. Nov. 2018 (CET)
- Nachgefragt: Siehst du da etwas über die Form von phi und theta? oder ? oder ? --Digamma (Diskussion) 11:51, 4. Nov. 2018 (CET)
- Wankwinkel Phi: , Nickwinkel Theta: nach Google-Suche. Hab keinen direkten Zugriff mehr auf die DIN-Dokumente.--Wruedt (Diskussion) 19:11, 4. Nov. 2018 (CET)
- Nochmals danke. --Digamma (Diskussion) 20:24, 4. Nov. 2018 (CET)
- Nach dieser Quelle scheint die Luftfahrt tatsächlich Großbuchstaben zu verwenden. --Digamma (Diskussion) 18:06, 5. Nov. 2018 (CET)
- Nochmals danke. --Digamma (Diskussion) 20:24, 4. Nov. 2018 (CET)
- Wankwinkel Phi: , Nickwinkel Theta: nach Google-Suche. Hab keinen direkten Zugriff mehr auf die DIN-Dokumente.--Wruedt (Diskussion) 19:11, 4. Nov. 2018 (CET)
- Ich habe mal die Großbuchstaben durch Kleinbuchstaben ersetzt und darauf hingewiesen, dass manchmal auch Großbuchstaben verwendet werden. Die Hinweise auf die Norm habe ich entfernt, weil ich einerseits keinen Zugang zur Luftfahrtnorm habe und nach obiger Auskunft in DIN 70000 griechische Kleinbuchstaben verwendet werden.
- Außerdem habe die Überschrift von "Tait-Bryan-Winkel" in "Kardanwinkel" geändert, weil das allem Anschein nach die im Deutschen gängigere Bezeichnung ist. Falls das doch nicht so ist, kann das auch wieder zurückgesetzt werden. --Digamma (Diskussion) 20:02, 10. Nov. 2018 (CET)
- Hab in DIN ISO 8855 nachgeschaut. Die Bezeichnungen sind: Gierwinkel: , Nickwinkel Theta: , Wankwinkel Phi: . Möcht aber niemand zumuten das zu ändern--Wruedt (Diskussion) 09:53, 5. Feb. 2019 (CET)
- Ist das nicht die Version, die derzeit im Artikel verwendet wird? --Digamma (Diskussion) 19:48, 5. Feb. 2019 (CET)
- In Roll-, Nick-, Gier wird für Wankwinkel verwendet. Aber wie gesagt wegen des riesen Aufwands ist eine Änderung nicht gerechtfertigt.--Wruedt (Diskussion) 20:45, 5. Feb. 2019 (CET)
- Ich habe es geändert. Mit Suchen&Ersetzen geht das recht fix. Das Bild habe ich auf die Version mit zurückgesetzt. Vielen Dank für deinen Hinweis. --Digamma (Diskussion) 21:41, 5. Feb. 2019 (CET)
- In Roll-, Nick-, Gier wird für Wankwinkel verwendet. Aber wie gesagt wegen des riesen Aufwands ist eine Änderung nicht gerechtfertigt.--Wruedt (Diskussion) 20:45, 5. Feb. 2019 (CET)
- Ist das nicht die Version, die derzeit im Artikel verwendet wird? --Digamma (Diskussion) 19:48, 5. Feb. 2019 (CET)
- Hab in DIN ISO 8855 nachgeschaut. Die Bezeichnungen sind: Gierwinkel: , Nickwinkel Theta: , Wankwinkel Phi: . Möcht aber niemand zumuten das zu ändern--Wruedt (Diskussion) 09:53, 5. Feb. 2019 (CET)


Lückenhaft
BearbeitenKein einziges reelles Bsp., nur eine Ansammlung von leeren Formeln. Bei der Länge des Artikels, Respekt. -- User: Perhelion 17:52, 9. Nov. 2018 (CET)
- Ein winziges Bespiel ist drin: g-Vektor ins körperfeste System transformieren. Das ist aber schon der einzige Hinweis auf die Transformation von Vektoren. Ansonsten ist der Artikel extrem geometrielastig. Es ist ständig von Raumpunkten die Rede. Das obenstehende Beispiel g-Vektor zeigt leider auch den Fall, der in der TM eher nicht so häufig vorkommt. Ein körperfestes System macht dann Sinn, wenn es in diesem System viele bekannte Vektoren gibt, die man gern ins Basissystem transformieren möchte. Z.B. sind im körperfesten System eines Autos die Positionen der Räder und die Kräfte darauf bekannt. Man möchte dann z.B. wissen ob die Räder im Basissystem über Pylone fahren und wie die Kräfte im Inertialsystem sind, um die Bewegungsgleichung im Inertialsystem hinzuschreiben. Dass man dazu nicht R überstrichen in umgekehrter Multiplikationsreihenfolge, sondern nur die R's (Elementarmatrizen) in der Reihenfolge der Drehungen Gier- Nick- Roll braucht, wird nicht erwähnt. Weiter ist wie oben ausgiebig diskutiert von passiven Drehungen die Rede, was kein Mensch versteht, der ne schlichte Transformationsmatrix vom körperfesten ins Basissystem braucht.--Wruedt (Diskussion) 09:37, 10. Nov. 2018 (CET)
- Ich möchte nur noch darauf hinweisen, dass es noch einen Artikel Roll-Nick-Gier-Winkel gibt. Das ist vielleicht der bessere Ort für Anwendungen in der Technischen Mechanik. Ansonsten kann der Artikel gerne ergänzt werden. --Digamma (Diskussion) 20:10, 10. Nov. 2018 (CET)
Analyse
BearbeitenDigamma, nimm es mir nicht Übel, du hast recht. Nur ist es besser die Besprechung von aktive und passive Drehungen separat zu machen, denn die Vermischung mit diesem Artikel führt zur Verwirrung.
Bei der Anwendung der Eulerschen Winkeln wird ein Objekt gedreht. Es gibt also ein raumfestes Koordinatensystem xyz und ein körperfestes System XYZ, das durch Drehung des xyz-Systems entstanden ist. Also:

Das Punkt im xyz-System hat im XYZ-System die Koordinaten:

- .
![{\displaystyle p=[p_{X},p_{Y},p_{Z}]=p_{X}e_{X}+p_{Y}e_{Y}+p_{Z}e_{Z}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/df0bc51d849bb26ca427fd9647c9cd02909a1150)
Das Bild unter der Drehung ist . Es hat im XYZ-System die Koordinaten

- .
![{\displaystyle P=[P_{X},P_{Y},P_{Z}]=P_{X}e_{X}+P_{Y}e_{Y}+P_{Z}e_{Z}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/57ecdd0a07c85fa786bd8e6f6e68a7da88ceaefd)
Die Übergang auf ist eine aktive Transformation. Es gilt im xyz-System:


und equivalent im XYZ-System:
![{\displaystyle P=P_{X}e_{X}+P_{Y}e_{Y}+P_{Z}e_{Z}=[P_{X},P_{Y},P_{Z}]=R(p_{X}e_{X}+p_{Y}e_{Y}+p_{Z}e_{Z})=R[p_{X},p_{Y},p_{Z}]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/b4dad7ff4d8be38aed4f77b30825f23fdb0256e0)
Die Übergang der Koordinaten im xyz-System zur Koordinaten im XYZ-System ist eine passive Transfromation. Es gilt:
-
- .
![{\displaystyle p=(p_{x},p_{y},p_{z})=[p_{X},p_{Y},p_{Z}]=p_{X}e_{X}+p_{Y}e_{Y}+p_{Z}e_{Z}=}](https://wikimedia.org/api/rest_v1/media/math/render/svg/f909bed9ae3000f776f5d17ba89509a77f2fc156)

Also ist:

- Notation
In der Literatur wird meistens die Notation für benutzt, und auch für sowohl als . Besonders das letzte ist einigermassen verwirrend.




- Aktive und passive Transformation
Deutlich ist was eine aktive Drehung ist. Unsicher, jedenfalls für mich, ist was eine passive Drehung ist. Zwar ist klar was eine passive Drehung ist, aber wird bei einer passiven Drehung das Koordinatensytem aktiv mit oder gegengesetzt mit gedreht? Madyno (Diskussion) 12:40, 11. Nov. 2018 (CET)


- Hallo Madyno, ich stimme mit dir überein, dass dies nicht der richtige Artikel ist um die Begriffe aktive und passive Drehung und deren Unterschied zu behandeln. Ich denke, der Artikel Drehmatrix ist der richtige Ort dafür.
- Hilfreich ist möglicherweise die Seite "Rotation Matrix bei Mathworld. --Digamma (Diskussion) 19:27, 11. Nov. 2018 (CET)
@Digamma: Ich habe versucht ein Vorschlag zu schreiben. Siehe Benutzer:Madyno/Test. Mein Deutsch ist natürlich Niederländisches Deutsch, aber das kannst du bestimmt ändern. Madyno (Diskussion) 22:02, 17. Nov. 2018 (CET)
Eulersche Winkel vs. Kardan-Winkel
BearbeitenDarf ich auch meinen Senf dazugeben? Ich habe einmal in meinem Bücherregal nach Eulerschen Winkeln gesucht, und bin auch mehrfach fündig geworden. In allen Fällen stimmen, bis auf die Benennung, die Eulerschen Winkel der Literatur mit denen des Artikels in Standard-x-Konvention überein.
a) In der Mathematik werden die Eulerschen Winkel z. B. eingeführt, um zu einer normierten Darstellung einer Drehung zu gelangen.
- Kowalski, Lineare Algebra (1975): , ,



b) In der Theoretischen Mechanik werden die Eulerschen Winkel zur Beschreibung der Rotationsbewegung eines starren Körpers eingeführt. Dabei geht es weniger darum, den Weg einzelner Punkte zu verfolgen; vielmehr werden z. B. Winkelgeschwindigkeit im körperfesten System, kinetische Energie, … durch die Eulerschen Winkel und ihre Ableitungen ausgedrückt. Als körperfestes System nimmt man dazu sinnvollerweise die Hauptträgheitsachsen.
- Landau-Lifschitz, Lehrbuch der Theoretischen Physik I (1966): , ,
- Sommerfeld, Theoretische Physik I (1977): , ,
- Spiegel, Thery and Problems of Theoretical Mechanics (1967: , ,
- Goldstein, Klassische Mechanik (1972): , ,




c) In der Astronomie tauchen die Eulerschen Winkel in Form von Bahnelementen (z. B. von Planeten) auf
- Unsöld, Der neue Kosmos (1974): (Länge des aufsteigenden Knotens), (Inklination), (Abstand des Perihels vom aufsteigenden Knoten)



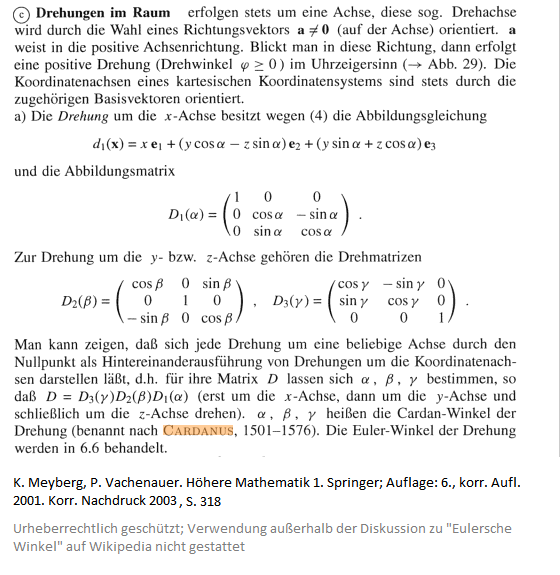{kind=link}
Mir sind da nirgends die Kardan-Winkel begegnet. Im Bronstein, Taschenbuch der Mathematik gibt es jeweils eigene Abschnitte ("Cardan–Winkel", "Euler-Winkel"). Für mich deutet all das darauf hin, dass die Kardan-Winkel _keine_ Eulerschen Winkel, sondern eine alternative, für gewisse Zwecke sicher bessere, Beschreibung von Drehungen im Raum ist. Was spricht eigentlich dagegen, den Abschnitt zu Kardan-Winkeln hier auf einen ganz kurzen Absatz zusammenzustreichen und ihn mit dem bereits vorhandenen Artikel Roll-Nick-Gier-Winkel zusammenzufassen? IMHO würde der Artikel dadurch gewinnen. --PaulSch (Diskussion) 19:39, 4. Dez. 2018 (CET)
„Kardanische Blockade“
Bearbeiten@Digamma: Zu deiner Einfügung des Begriffs „kardanische Blockade“: Kannst du mir Belege aus der Fachliteratur nennen, die diesen Begriff benutzen und gegenüber Gimbal Lock vorziehen? Am besten datiert vor der unbelegten Einfügung durch die alles eindeutschen wollende IP. Auf Talk:Gimbal Lock#Der Begriff sollte der Fachsprache gemäß "Kardanische Blockade" und nicht "Gimbal Lock" heißen finde ich jedenfalls nur Behauptungen, dass dies die geläufigere Bezeichnung im deutschen Sprachraum sei, aber keine Belege. --Sense Amid Madness, Wit Amidst Folly (Diskussion) 18:35, 11. Jun. 2019 (CEST)
- Ich habe den Begriff nicht eingefügt, sondern nur deine Löschung rückgängig gemacht. Nein, ich habe keinen Beleg. Ich kenne mich da nicht aus. Ich halte nur deine Begründung, dass der Begriff im Zielartikel nicht vorkommt, nicht für ausreichend, um ihn zu entfernen. Ich halte es außerdem für unwahrscheinlich, dass es dafür keinen deutschen Fachausdruck geben soll. Und hier ein Treffer aus einer Fachhochschulvorlesung. --Digamma (Diskussion) 18:47, 11. Jun. 2019 (CEST)
- Das ist aber schwerlich ein Beleg dafür, dass das die in der deutschen Fachsprache geläufige Bezeichnung sei. Und in der deWP verwenden wir natürlich die jeweils üblichen Fachausdrücke. --Sense Amid Madness, Wit Amidst Folly (Diskussion) 19:01, 11. Jun. 2019 (CEST)
- Mal umgekehrt gefragt: Hast du Belege dafür, dass im Deutschen der Begriff "Gimbal Lock" üblich ist? Im Artikel ist keine deutsche Literatur angegeben. --Digamma (Diskussion) 19:04, 11. Jun. 2019 (CEST)
- Für den Anfang ein paar Suchmaschinentreffer:
- Google-Suche: 142 Treffer für "gimbal lock" "achsen", 32 für "kardanische blockade" "achsen"
- Google Books: ~7 vs. 1
- Google Scholar: einige Dutzend vs. 1
- --Sense Amid Madness, Wit Amidst Folly (Diskussion) 19:27, 11. Jun. 2019 (CEST)
- Das spricht dann dafür, dass "Gimbal Lock" üblicher ist. Aber nicht dafür, dass "kardanische Blockade" ungebräuchlich ist. Insbesondere rechtfertigt das nicht die Löschung der Weiterleitung. --Digamma (Diskussion) 19:42, 11. Jun. 2019 (CEST)
- Lass uns das lieber drüben beim richtigen Artikel diskutieren. Hier würde ich derweil auf die nach erstem Ergebnis deutlich üblichere Form zurücksetzen, ok? --Sense Amid Madness, Wit Amidst Folly (Diskussion) 19:47, 11. Jun. 2019 (CEST)
- Das spricht dann dafür, dass "Gimbal Lock" üblicher ist. Aber nicht dafür, dass "kardanische Blockade" ungebräuchlich ist. Insbesondere rechtfertigt das nicht die Löschung der Weiterleitung. --Digamma (Diskussion) 19:42, 11. Jun. 2019 (CEST)
- Für den Anfang ein paar Suchmaschinentreffer:
- Mal umgekehrt gefragt: Hast du Belege dafür, dass im Deutschen der Begriff "Gimbal Lock" üblich ist? Im Artikel ist keine deutsche Literatur angegeben. --Digamma (Diskussion) 19:04, 11. Jun. 2019 (CEST)
- Das ist aber schwerlich ein Beleg dafür, dass das die in der deutschen Fachsprache geläufige Bezeichnung sei. Und in der deWP verwenden wir natürlich die jeweils üblichen Fachausdrücke. --Sense Amid Madness, Wit Amidst Folly (Diskussion) 19:01, 11. Jun. 2019 (CEST)
Der Bezug zur DIN 9300 fehlt
BearbeitenLuft- und Raumfahrt; Begriffe, Größen und Formelzeichen der Flugmechanik; Bewegung des Luftfahrzeuges gegenüber der Luft; ISO 1151-1:1988 modifiziert
Ausgabe 1990-10 --95.91.251.60 09:43, 28. Apr. 2024 (CEST)
- Reicht es nicht, wenn dieser Bezug im Artikel Roll-Nick-Gier-Winkel hergestellt wird? Nur auf diesen Fall bezieht sich doch die Norm, oder? --Digamma (Diskussion) 21:02, 28. Apr. 2024 (CEST)
Intrinsisch vs. extrinsisch
BearbeitenDie Unterscheidung zwischen intrinsischer und extrinsischer Drehung ist künstlich und führt in die Irre. Tatsächlich ist das eine lediglich das Inverse des anderen. Einmal wird Koordinatensystem A gegen das Koordinatensystem B gedreht, das andere mal B gegen A. Da ist es doch völlig schnuppe, ob man sich an das eine einen Stein angeheftet denkt oder nicht, oder ob man das andere als raumfest betrachten will oder nicht. Ich plädiere dafür, den "Rechen-Voodoo" wegzulassen, und die Begriffe "intrinsisch", "extrinsisch", wenn überhaupt nötig, höchstens in einem Abschnitt "psychologische Interpretation" zu erwähnen.
--ds --2001:9E8:4777:3B00:35DE:50BF:36BE:C46C 09:37, 18. Feb. 2025 (CET)
- Da stimme ich deutlich nicht zu. Was mathematisch (evtl. bis auf Vorzeichen) identisch ist, kann beim Versuch, sich das vorzustellen, doch sehr unterschiedlich sein. Drehungen entweder um feste Koordinatenachsen oder um (mitgedrehte) Körperachsen gehören m.E. dazu. Der Artikel sollte so bleiben. --Bleckneuhaus (Diskussion) 15:15, 18. Feb. 2025 (CET)